指先に乗るほど超小型! ロボットの新たな進化を促す6軸力覚センサー:独自のMEMS構造で圧倒的な小型化を実現
指先に乗るほど小さな6軸力覚センサーが登場した。多指ロボットハンドの指など、狭小スペースにも力覚センサーを搭載でき、より高精度かつ繊細な作業をロボットにさせることが可能になる。ロボットハンド以外でも、さまざまな用途で6軸力覚センサーの活用が広がる可能性がある。
「人間が持つ感覚」を再現する力覚センサー
人手不足の解消や生産性の向上を実現するため、製造業や物流業、建設/土木業、食品業界などさまざまな分野でロボットを活用した自動化が進んでいる。特に製造業で活用されているのが、ピックアンドプレースや端子の挿入といった組み立て作業を担う産業用ロボットハンドだ。
物をつかんで持ち上げたり運んだりする産業用ロボットハンドには、人間の手と同じようなきめ細かい動きが求められるようになっている。人間は物をつかむ際、単純につかんでいるわけではなく、つかむ物の大きさや柔らかさに合わせて無意識に力加減を調整している。こうした動きをロボットに再現させるのは非常に難しい。だが、人手による作業を減らして工場や生産ラインの自動化をさらに進めるために、扱う物や作業内容に合わせて柔軟に力加減を調整できる機能がロボットハンドにも求められている。
このような、“人間が持つ感覚”をロボットに与えるために、産業用ロボットハンドなどに搭載されているのが力覚センサーだ。
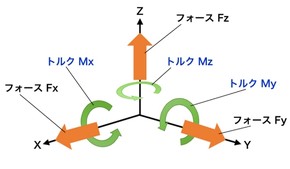
力覚センサーは、ある1点に作用するフォースやトルク(モーメント)の大きさと方向を測定するセンサーだ。人間の五感でいえば触覚に当たり、人間の触覚を再現する目的で産業用ロボットに搭載されていることが多い。特に、X/Y/Zの3軸にかかるフォースとトルクをそれぞれ検出できる6軸力覚センサーは、多くのロボットハンドに搭載されている。6軸力覚センサーを用いることで正確なフォースとトルクを測定できる。カメラで撮影した画像を使うビジョンのみでは対応し切れない、より繊細で精密な作業ができるようになる。こうした作業の例として、柔らかい端子やコネクターの挿入作業、精密なネジ締めやバリ取り、力加減が難しい研磨作業、位置合わせが難しい嵌合(かんごう)作業などが挙げられる。
だがここで課題になるのが、6軸力覚センサーのサイズだ。より繊細な作業をさせたり、より省スペースで稼働させたりするため、ロボットハンドには多指/多関節化と小型化が求められている。既存の6軸力覚センサーは一般的なサイズでφ80mm前後だ。狭小な箇所に搭載するのはかなり難しい。最小ではφ17mmほどだが、小型のロボットハンドの指1本1本にセンサーを搭載するとなると、それでも大き過ぎる場合がある。そのため、より小さな6軸力覚センサーが求められている。価格面の制約も大きい。φ17mmの6軸力覚センサーは非常に高額で、ロボットの価格帯によっては採用が難しいことも多い。
指先に乗るほど小型な力覚センサー

ミネベアミツミが開発して既に量産を開始している6軸力覚センサーは、こうした課題に応える製品だ。MEMSと起歪体(きわいたい)を一体化させた独自の構造を採用し、外形寸法はφ9.6mm×9mm。直径サイズが従来のφ17mmの56%という小ささが最大の特長だ。ミネベアミツミ 営業本部 マーケティング部で主査を務める安藤康師氏は、「これまで搭載が難しかった小さなスペースにも6軸力覚センサーを採用できるようになる」と強調する。
同社の6軸力覚センサーは、ピエゾ素子を作り込んだMEMSと、硬い焼結金属でできている起歪体を組み合わせている。フォースがかかって起歪体が変形すると、MEMSも変形する。そのひずみからフォースの量や方向を測定する仕組みだ。安藤氏は、「ピエゾ素子を作り込んだMEMSのセンサー部分は、物体のひずみを計測するときに一般的に使われるひずみゲージよりも約100倍感度が高い。そのため、起歪体の微小な変形を検出できる。これにより、小型でも既存品と同レベルの、高い定格荷重を実現できる」と話す。


主な定格は、定格荷重(フォース、トルク)が40N、0.4N・m、耐荷重(同)が200N、1.8N・m、実効分解能(RMSノイズ)Fx、Fy/Fzが0.04NRMS/0.06NRMS、Mx、My/Mzは0.0004N・mRMS/0.0008N・mRMS。これは、φ17mmの従来品と同程度のレベルだ。「このサイズで同レベルの定格を実現している製品は、当社調べではまだ存在しない」(安藤氏)

さらに、センサー内でA/D変換するのでノイズ特性が良いことも特長だ。A/Dコンバーターを含めてアナログフロントエンドが起歪体の中に作り込まれていて、MEMSが検知したフォース/トルクのアナログデータにノイズがのる前に素早くA/D変換できる。そのため、出力のデジタル信号にノイズがのりにくい。「シミュレーションとほぼ一致したデータを得られると評価されている」(安藤氏)
ミネベアミツミの半導体統括部 シニアエンジニアの坂元稔樹氏は、「技術的に最も難しいのは、1個のMEMSチップで3軸のフォースと3軸のトルクを全て検出するという点だ。当社のMEMS圧力センサーで培ってきたノウハウを生かして実現した。6軸全ての検出を1個のMEMSチップで可能にしていること、そしてアナログフロントエンドの作り込み。これらに当社のノウハウが詰め込まれており、それが小型化を実現できた理由の一つだ」と話す。
半導体プロセスを用いて製造できることも特長だ。「ワイヤボンダーなど半導体製造と同じ装置を使えるので、追加投資の費用を抑えられる。そのため量産性に優れ、同等の特性を持つ従来品の半分以下の価格帯になっている」(安藤氏)
高性能なハプティクスロボットの実現に貢献
安藤氏は、「当社の小型6軸力覚センサーは次世代のロボットを見据えた、市場を先回りした製品だ」と強調する。「ロボットハンドの自動化には主にビジョンセンサーが使われているが、物体の重さや硬さの把握など、ビジョンだけでは対応し切れない部分もある。それを6軸力覚センサーで補いたいというニーズが高く、2022年後半から引き合いが増えている」と語る。
特に、2020年代前半に本格的な到来が予想されている、ハプティクスロボット市場に活路を見いだしている。触覚をデジタル化して、“実際に物に触れているかのような感覚”として再現するハプティクス技術は既にゲーム用コントローラーなどに応用されていて、ロボットへの搭載も始まっている。ロボットにハプティクス機能を搭載することでより高精度な遠隔操作が可能になるので、製造業のみならず外科手術など医療分野での活用にも関心が高まっている。「顧客からも、ハプティクス機能を求める声が高まっている」(安藤氏)。ミネベアミツミの6軸力覚センサーを搭載したハプティクスロボットも市場に既に投入されていて、幾つかのメーカーでは評価も進んでいる。φ9.6mmと小型であれば多指ロボットハンドの指1本1本にも搭載でき、より高精度なハプティクスロボットの実現につながるだろう。
さらに、今後有望な市場とみているのが比較的安価な産業用ロボットだ。ホビーや教育用途向けに20万円未満で販売されている安価なロボットを高機能化させた、50万円未満のロボットが製造業やサービス業での単純作業に使われ始めている。「こうしたロボットに6軸力覚センサーを搭載し、単純な組み立て作業などに使いたいという問い合わせが増えている。比較的安価なロボットなので、市場拡大の可能性が高いと期待している」(安藤氏)
医療やメタバースなど、広がるアプリケーション
ロボット以外のアプリケーションでも引き合いは多い。医療関連では、歯科矯正に採用されている。1本1本の矯正器具に6軸力覚センサーを搭載するのだ。その他、切断治具にかかる振動の強さを測定したり、有線ドローンのワイヤのテンションを測定したりする用途にも使われている。

製造業でも注目されているメタバース向けには、新しい3次元入力デバイスとして活用できる可能性がある。6軸力覚センサーを使えば、前後左右と上下、あらゆる方向に加えて押し込むフォースも検出できるので、「スイッチを押し込むことで前方に進む」「上空から地上に一気に移動する」といったことが可能な入力デバイスなども開発できるだろう。
ミネベアミツミは、6軸力覚センサーと評価基板、アプリケーションソフトで構成される評価キットを提供中だ。

今後は、量産性を向上させるべく6軸力覚センサーの製造を海外工場に移管することも視野に入れている。海外に多数の拠点を構える同社は、グローバルでのサポート体制も充実している。
指先に乗るほど小さな6軸力覚センサーは、これからのロボットの機能を大きく変える可能性を秘めている。評価キットで6軸力覚センサーの性能を実感してはいかがだろうか。
Copyright © ITmedia, Inc. All Rights Reserved.
提供:ミネベアミツミ株式会社
アイティメディア営業企画/制作:EE Times Japan 編集部/掲載内容有効期限:2023年7月25日


