自動車・低空・農地で「誤差数センチ」、小型GNSS受信モジュールの性能が分かった:低価格な衛星測位の実力は?
人工衛星を利用した高精度測位が変わろうとしている。低コストのモジュールを利用して、従来と同等の位置精度「数cm」を確保できそうだからだ。民生市場に広く役立つ見込みがある。研究者が発表した同モジュールの評価・検証結果を紹介する。
人工衛星*1)を利用して位置を測定する「衛星測位システム(GNSS:Global Navigation Satellite System)」が大きく変わろうとしている。きっかけとなったのは、誤差数センチメートル(cm)で測位が可能なモジュールが2016年2月に登場したことだ。スイスu-blox(ユーブロックス)の「NEO-M8P」モジュール(質量1.6g)と、アプリケーションボードである。
衛星から2種類の電波を受信する2周波GNSSでは、これまでも数cm精度を実現できており、製品としても完成している。だが、高価で装置の寸法が大きいことから、用途が限られていた。
NEO-M8Pは1周波GNSSであり、コストを大幅に抑えたモジュールだ。内部に演算機能を備えているため、外付けのコンピュータを必要とせず、小型で軽量、低消費電力でもある。民生市場を中心に用途が大きく広がりそうだ。このため、複数の大学や企業が製品発表後、評価を進めてきた。
ユーブロックスジャパンが主催した「高精度GNSSレシーバーセミナー」(2016年12月16日、東京)では、研究者による評価に対して、どの程度の性能が得られるのか、関心が集まった(図1)。
評価結果からは、NEO-M8Pを利用した安価なシステムの測定誤差が、予想に反して従来の高価なシステムと同等であることが分かった。
*1) 米国のGPS(Global Positioning System/全地球無線測位システム)の他、ロシアのGLONASS(グロナス)や欧州連合のGalileo(ガリレオ)、中国のBeiDouといった衛星測位システムが運用されている。
農業ニーズの高いロボット除草機を実現
東京大学大学院農学生命科学研究科で准教授を務める海津裕氏は「農業分野におけるRTK-GNSSの展開と課題」と題し、ロボット除草機の自動化について発表した(図2)。
海津氏によれば、GNSSだけを用いて誤差数cmの精度を実現するリアルタイムキネマティック(RTK:Real Time Kinematic)技術には、10年以上の歴史がある。
1990年代半ばからRTKの研究開発が始まり、方位精度1度、横方向偏差2.5cmを達成。2002年にはRTKを用いた実用システムの販売が始まったという。用途は農業用トラクターだ。日本国内でもRTKシステムが販売されている。
これらのRTKシステムには冒頭で紹介したような課題がある。機器が大きく、高価なことだ。トラクターのような大型の機械であれば問題ないが、より小型の機器には導入しにくい。
例えばロボット除草機だ。あぜの除草は時間がかかる*2)重労働であり、危険もある。これを改善するロボット除草機には、小型、軽量で安価なRTKシステムが必要だ。
*2) 2014年の農産物生産費統計によれば、国内の米生産において、水管理・草刈りに必要な時間が、全労働時間の26%を占めているとした。
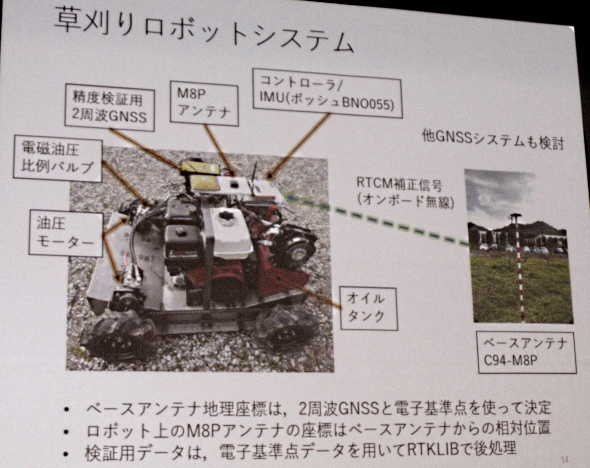
海津氏の研究チームは三陽機器と共同で、40度の急斜面に対応し、旋回を必要としない両方向刈り(ジグザグ走行)に対応したロボットを開発した(図3)。
RTKシステムでは、カーナビゲーションシステムなどとは異なり、正確な位置を確定させた固定局をあらかじめ用意する必要がある。今回の研究ではユーブロックスが固定局向けとして開発したモジュール「NEO-M8P-2」を用いた。草刈りロボットはGNSS測位の際に、衛星から得た位置情報の誤差を固定局から得た補正情報によって修正、正確な相対位置座標を得る仕組みだ。
どの程度の位置精度が得られるのかを検証するため、NEO-M8Pモジュールの他に、2周波GNSS用モジュールも搭載し、比較した。
静止状態で測位した結果はこうだ。NEO-M8Pシステムは2周波GNSSよりも測位結果の分散が小さかった。ただし、絶対値では北方向に約1cmのずれがあった。
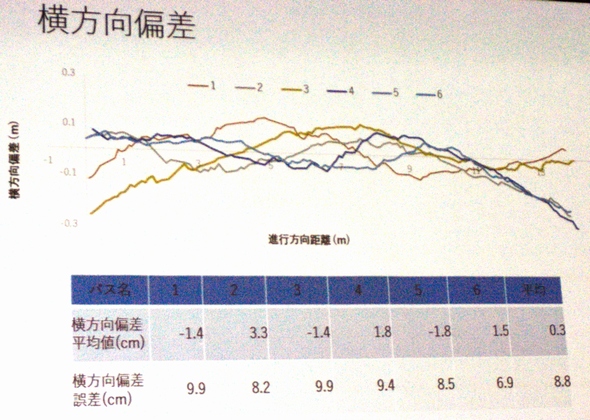
4点を決めた領域内でロボット除草機を走行させたところ、1周波GNSSと2周波GNSSの軌跡は一致した。それどころか1周波GNSSの方が、衛星からの情報によって位置を精度よく決められた範囲の比率(fix率)が高かった*3)。測位データのばらつきも2周波GNSSより小さかった。横方向偏差の値を図4に示す。
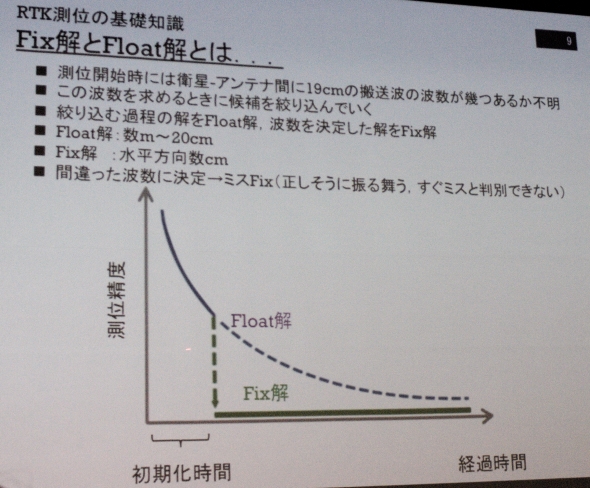
*3) RTKでは衛星と受信機の間に搬送波の波数が幾つ存在するのか(整数アンビギュイティ)を決定することで高い位置精度を導いている。波数決定に必要な収束時間を初期化時間と呼ぶ。収束前(float状態)の誤差は19cm〜数m。収束後は誤差数cmに収まる。2周波GNSSがNEO-M8Pのような1周波GNSSに勝るのは、収束時間が短いことである。
1周波GNSSには課題もある。電源を投入してから最初の測位結果を得るまでにある程度の時間(初期化時間)を要することだ。草刈りロボットの研究では、初期化時間が10分以内という結果が得られた。
GNSSは樹木に弱いのか
茨城工業高等専門学校電子制御工学科で准教授を務める岡本修氏は「つくばチャレンジの場を使ったRTK測位の実証実験」と題し、構造物や樹木が多い環境において、RTKシステムがどの程度正確に動作するのか、結果を発表した(図5)。
岡本氏はまず、衛星を利用した測位技術を分類し、RTK法と他の手法を比較した(図6)。RTK法は移動(kinematic)しながら数cmの精度を得られることが特徴だ。ただし、固定局が必要になる(相対測位法)。

高い精度が得られた状態(fix解)と、精度が低い状態(float解)の関係も示した(図7)。測位を開始したとき、次第に位置精度が高くなり(float解)、ある時点で急に精度が高まる(fix解)ことが分かる。
GNSSは複数の衛星からの信号を検出できなければ動作しない。都市部や樹木の多い環境では十分な信号を得られない可能性がある。
岡本氏によれば、従来のGPSだけを使う測位と比べて、状況が改善されてきているのだという。東京で観測した場合、GPSと日本独自の準天頂衛星システム(QZSS)だけを対象とすると12衛星しか利用できない。ところが、GLONASSやGalileo、BeiDouを加えれば32衛星となる。衛星の数に余裕ができれば、良好な信号が得られなかった衛星を使わずに、高い精度を得やすい*4)。
まずは一周約2kmの市街地道路を自動車で走行した場合の測位結果を発表した(図8)。走行直後にfix解を得ることができ、ほぼその状態を維持できた。
*4) 2000年代初頭までは30機のGPS衛星だけが、稼働していたが、2010年からはGLONASSとQZSSが加わって55機に、2016年以降はBeiDouとGalileoが利用できるようになり、100機以上がそろった。

次に20m×50mという1階建ての建物の周囲を沿うように歩行した場合を紹介した。樹木の下や軒下に入るルートを採った場合も、ほぼ全ての地点でfix解を得られたという。同じルートを2周波GNSSで検証したところ、fix解が得られた範囲は69.6%にとどまった。
つくば市のロボット特区で開催されたつくばチャレンジ会場では、構造物や樹木の多い全長2.1kmのコースにおいて、NEO-M8Pモジュールの性能を検証した。見通し可能な衛星が少なくなった結果、fix解が得られた範囲は55.9%まで低下した。
船舶と自動車を比較

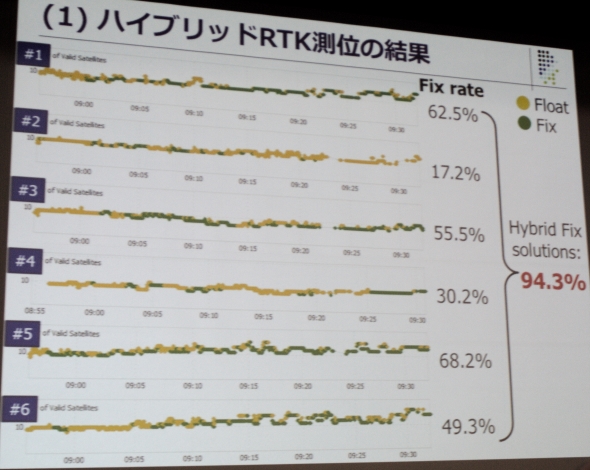
コンピュータ・システムの代表取締役である木村法由氏は、「移動体におけるM8PのRTK評価」と題して、自動車や船舶にRTKシステムを搭載した場合の実験結果を発表した(図9)。2周波GNSSとの比較である。
木村氏の評価では、RTK用の補正データを送受信するため、2016年に開発したSOI(Serial Over IP)通信ボックスを2台用いた*5)。
実験の現場は琵琶湖。南端に近い草津市から測位を開始した。船舶の場合は固定局から11km離れた琵琶湖大橋の橋脚の周囲を折り返す際に一時的にfloat解となったものの、fix解の得られた範囲は98%を超えた(図10)。
*5) 固定局のアンテナで受信した信号を2周波GNSSとNEO-M8Pの固定局用受信機に送り、それぞれの受信機が送出した補正情報を、固定局側のSOIが受け取る。移動局側のSOIにインターネット経由で通信して、それぞれの受信機に補正情報を送り込む仕組み。
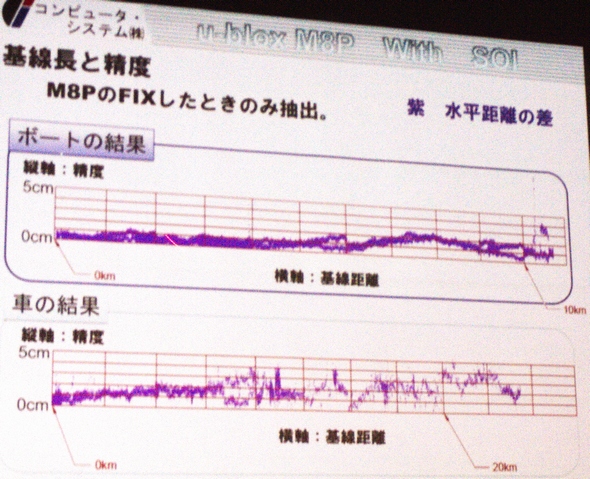
自動車は固定局から北に湾岸に沿って北上。約25km地点を折り返すコースをたどった。fix解が得られた範囲は89.0%だった。
GNSSだけで正確に三次元計測できるドローン
早稲田大学高等研究所で准教授を務める鈴木太郎氏は「UAVでの一周波RTK-GNSSの利用とその応用」と題して、ドローンにおける位置精度の実際や姿勢推定手法について発表した(図11)。
鈴木氏の問題意識はドローンを利用した三次元計測、リモートセンシングにある。防災・被災情報の収集をはじめ、科学観測や植生観測にUAV(Unmanned Aerial Vehicle)を使う。
地表を直接三次元計測するUAVを考え、地上15mを飛行することを前提とした。その場合、上空で誤差1cmという精度での測位が必要なことはもちろん、UAVの姿勢制御にも条件が付く。0.1度の精度が必要になるのだ。地上用途に比べて難易度が高い(図12)。
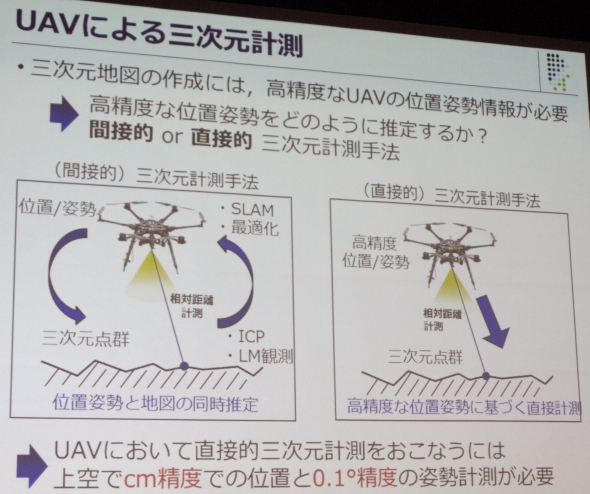
従来の位置推定手法はGPSを利用したものであり、精度は3m程度だった。姿勢推定手法として、加速度センサーやジャイロセンサー、磁気センサーなど複数のセンサーを複合することで、3度程度が実現できていた。
実用化が進んでいる2周波GNSSと各種センサーを組み合わせることで目的の高い位置精度と姿勢精度は実現できるものの、数千万円のシステムになってしまう。
UAVに搭載するためには、軽く小さいシステムでなければならない。1周波GNSSであればこうした要望に応えられる。1周波GNSSは2周波数GNSSよりもfix解を得るまでの時間が長いという課題があるものの、他の発表にもあったように利用できる衛星数が増えることで、時間短縮できることを強調した。
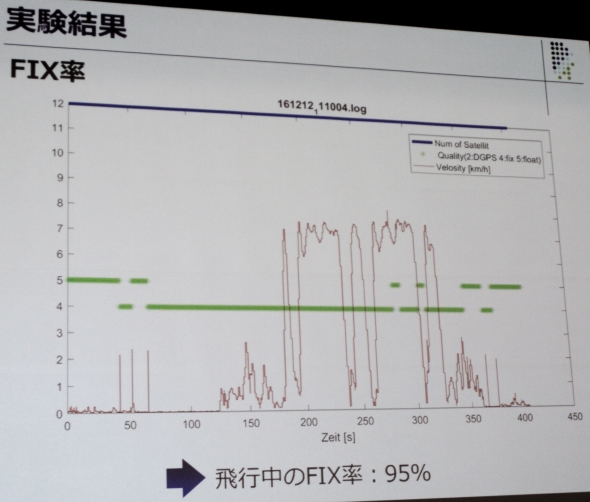
1周波GNSSを用いたシステムの性能はどうだったのだろうか。高度15m、速度毎秒2mで約10分間飛行したところ、飛行中にfix解を得られた範囲は95%に達した(図13)。
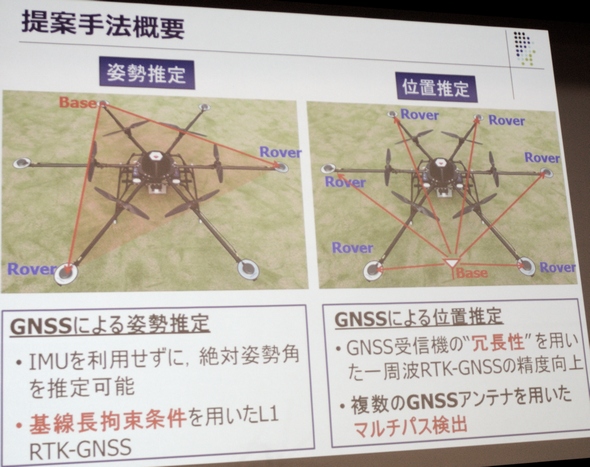
鈴木氏はさらに挑戦的な実験にも取り組んだ。1周波GNSS(アンテナと受信機)を複数、UAVに搭載する実験だ。利点は2つある。姿勢推定と位置推定だ。
姿勢推定の利点はこうだ。慣性センサー(IMU)などのセンサー群を廃し、衛星測位だけで姿勢制御までカバーできる(図14左)。最低3点の位置が決まれば、平面(角度)が定まる。GNSSアンテナ間の距離として1.5mを確保できれば、0.1度という目標を実現できるとした。
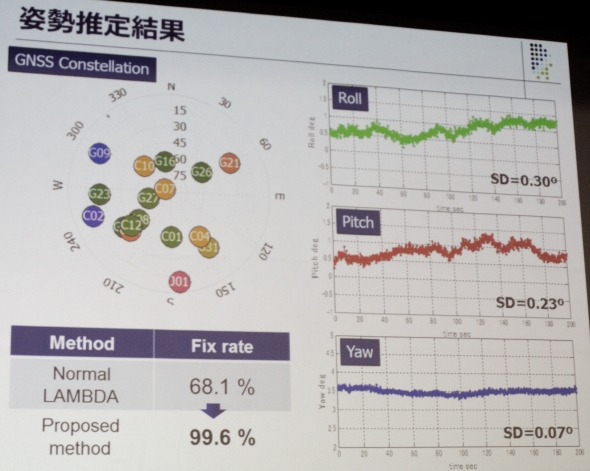
実機で検証したところ、ロールの標準偏差0.3度、ピッチ0.23度、ヨーは0.07度が得られた。fix解が得られた範囲も99.6%まで向上した(図15)。
もう1つの利点である位置推定でも成果を得た(図14右、図16)
補正情報提供サービスを2018年までに開始

最後に登壇したのは、スイスu-bloxでMarket Development Managerを務めるPeter Fairhurst氏(図17)。「Evolution of high precision technology for the mass market」と題して、今後の製品戦略、サービス戦略を明らかにした。
世界各国で、インターネットや衛星通信を通じて、GNSSの補正情報を提供するサービスを開始することを発表。2018年までに自動車交通が集中する地域をカバーできるようにするとした。
ユーザーが固定局を用意しなくても、NEO-M8Pなどの高精度なGNSSモジュールを利用できる未来が見えた。
Copyright © ITmedia, Inc. All Rights Reserved.
提供:ユーブロックスジャパン株式会社
アイティメディア営業企画/制作:EE Times Japan 編集部/掲載内容有効期限:2017年2月25日