6万人のメイドが“合体”!? EtherCATの通信方式:江端さんのDIY奮闘記 EtherCATでホームセキュリティシステムを作る(5)(7/8 ページ)
今回は、EtherCATにおける4つの通信方式を解説したいと思います。EtherCATには、マスタ(ご主人様)が、スレーブ(メイドたち)の“身上調査”を行うための「SDO通信」用に3種類、“仕事内容”を送信するための「PDO通信用」に1種類の通信方式があります。膨大な量のフレームが飛び交うEtherCAT通信の世界を、さっそくのぞいてみましょう。
得をしているのは“ご主人様だけ”なのか?
しかし、よくよく考えれば、この「テレパシー通信」……じゃなくて「論理アドレス通信」でラクできるのは、マスタ(ご主人様)だけのように思えます。
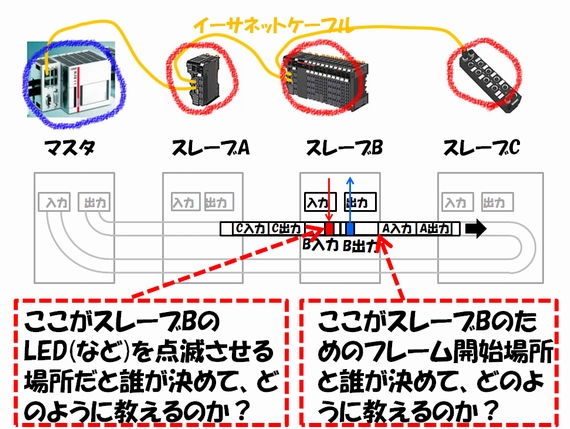
スレーブ(メイド)は、流れてくるイーサネットフレームの中から自分宛のメッセージを切り出さなければならないし、その切り出したメッセージを自分のメモリに割り当てなければなりません。
スレーブ(メイド)側だって、こんな面倒くさい処理をしていたら、通信速度は遅くなるだろうし、そのために高速処理用のチップなんぞを搭載したら、スレーブの価格は高くなってしまいます。
そこで、EtherCATでは、これらの問題をフィールドバス用メモリ管理ユニット(FMMU)や、SyncManagerを使って解決しています(次回以降に説明します)。
要するに、マスタ(ご主人様)とスレーブ(メイド)は、実際の仕事(PDOの通信)を開始する前に、SDOの通信を使って、完璧かつ綿密な打合せを完了させてしまうのです。
だから、たかだか3つのEtherCATスレーブのSDOの通信だけで、1000を超えるフレームが飛び回っているわけなのです。
以上、今回はEtherCATの4つの通信タイプについて説明致しました。
『そろそろLEDの点滅だけではなく、何か動かしてみないとヤバイなあ』と思っています(そもそも、そういう公約を掲げて始めた連載でした)。
しかし、現時点で、私がSOEM(Simple Open Ethernet Master)を使って、完全にコントロールできるのはDI/DOとAI/AOのスレーブだけです。まあ、しかしこれらが動かせれば、基本的にはなんとかなる(する)のが「制御の世界」だったするのですが。
まあそれはともかく、―― まずは、「ピタゴラスイッチ」レベルでも、EtherCATで何かを動かしてみないとなぁ、と考えています。
動くと楽しいし、楽しいから頑張れる。
いつだって、エンジニアのエンジンは、「楽しい」という燃料で動いているのですから。
Copyright © ITmedia, Inc. All Rights Reserved.