広角カメラ対応の車線逸脱警報技術を開発――富士通研:足元だけで先を見通す!
富士通研究所は2014年6月10日、現在、専用の狭角カメラで実現されている車線逸脱警報システムを、ドライブレコーダーなどに使用される広角カメラでも実現できる技術を開発したと発表した。
富士通研究所は2014年6月10日、ドライブレコーダーなどに使用される広角カメラで実現可能な車線逸脱警報技術を開発したと発表した。従来、車線逸脱警報システムはより遠くまで捕らえる狭角カメラが必要になったが、新技術によりドライブレコーダーなどとカメラを共通化できる。
専用の狭角カメラが不要に
車両走行中の路外逸脱を防ぐための車線逸脱警報システムは、白線までの距離がおおよそ30cm以下になった場合に警報を発するような性能が一般的に要求されている。現状、専用の狭角カメラを用いたシステムが実用化されてきた。車線逸脱警報システム用の狭角カメラは、一般的に30°程度の画角でより遠方の路面も撮影でき、安定した車線認識が行いやすくなっている。
一方で、業務用自動車を中心に搭載率が高まっているドライブレコーダーなどに使用されるカメラは、より多くの情報を記録するためにも、130°というようなより広い画角の撮影が行える広角カメラが用いられている。ドライブレコーダーと車線逸脱警報システムとで1台のカメラを共有できれば、コストやサイズ面で多くのメリットを発揮できる。ただ、遠方の白線を撮影できない広角カメラでは、十分な精度での白線認識が困難で、共通化することはできていなかった。
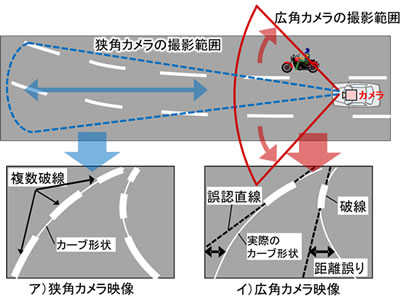
例えば、白い破線による車線が引かれているカーブ(以下、破線カーブ路)の認識だ。白い破線は約8m区切りで引かれているが、広角カメラでは約8mの1つの破線しか撮影できず、短い線でカーブがどの程度曲がっているか判別しにくい。
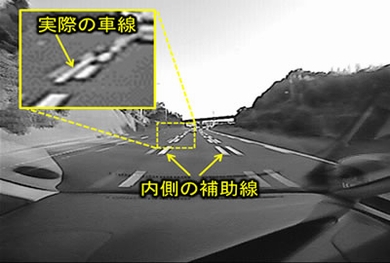
また、大きなカーブなどでは、車線の両側に減速や注意を促す補助線が引かれる「多重線路」があるが、これを広角カメラで撮影すると解像度不足から本来の車線よりも内側にある補助線を車線(走行線)として誤認してしまうという課題もあった。
破線カーブ路、多重線路に対応
富士通研では、広角カメラを車線認識に用いた場合に課題となる「破線カーブ路」、「多重線路」でも正しく白線形状を推測、検知する技術を開発した。
破線カーブに対しては、短時間では道路形状の変化が少ないことに着目して、例えば100ミリ秒ごとといった時系列の複数画像の破線をつなぐことで車線形状を復元する技術を考案。ただ、車両の移動によって白線位置は画像ごとにずれるため、単純にはつながらない問題がある。そこで、車両の動きと車線形状を同時に推定して正しい車線形状を推定する方式を開発したという。
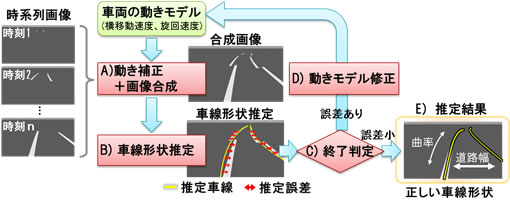
具体的には次の3つの手順で、破線カーブ路を正しく推定するという。
- 車両の動きを横移動(等速移動)と旋回(等速旋回)でモデル化し、時系列の白線画像から動きモデルを用いて移動の影響を補正した路面合成画像を作成。
- 合成画像の白線から車線形状を推定。動きモデルが実際の動きと異なると推定誤差が生じる。
- 推定誤差が十分小さくなるまで、動きモデル(横速度、旋回速度)を修正して、再度、動き補正/画像合成から処理を繰り返し、最終的に自車両の動きを補正した正しい車線形状を推定。
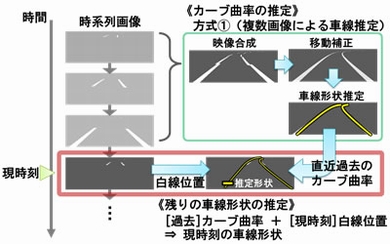
車線逸脱の危険に遅れなく警報を発するリアルタイム性が要求されるが、この手法では正しく推定できるものの、複数時刻の画像を用いるため処理が間欠的となり、リアルタイム性の確保が課題になる。そこで富士通研は、道路の曲がり具合(カーブ曲率)が分かっているならば、各時刻の1枚の画像からでも推定できることを利用し、カーブ曲率だけは直近過去の車両前方の複数画像を用いて上の手法によって算出し、カーブ曲率以外の車線形状(道路幅、車両向きなど)は、現時刻の単一画像から算出する時間差によるパラメーターの推定方式を開発したという。
富士通研では、「カーブ曲率は短時間では変化が少ないため、時間的に近い過去画像から算出しても車線形状の推定精度はほとんど劣化しない。開発した車線推定方式により、各時刻でリアルタイムに車線形状を推定できる」とする。
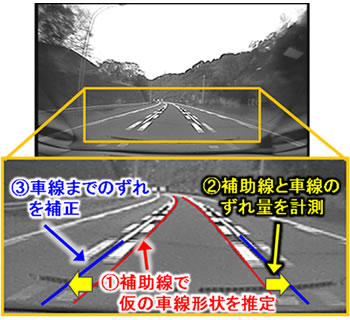
多重線路に対しては、内側の補助線が実際の車線と平行に一定距離内側に敷設されることを利用。一度、内側の補助線を用いて「仮の車線形状」を推定。その後、走行に伴い実際の車線が自車両の近くに位置して大きく映る場合に、計測した補助線と車線とのずれ量を用いて、仮の道路幅を補正する方式を開発した。
開発した技術方式を実路で撮影した広角カメラ映像データ(160分)で評価したところ、「従来方式に比べて約2倍の性能となる96%の割合で、性能基準を満足する精度(誤差30cm以下)で白線までの距離を計測できることを確認した。加えて、車線逸脱警報性能では、延べ460回の車線変更に対する評価で、95%の精度で車線逸脱を正しく警報できることを確認した」(富士通研)。
2014年中の実用化を目指す
富士通研では、「この技術によって、広角カメラであっても安定して車線白線を検出でき、普及が進むドライブレコーダーのカメラを利用して、各種性能基準を満足する高精度な車線逸脱警報を低コストに実現できる。2014年度中の実用化をめざす」としている。
Copyright © ITmedia, Inc. All Rights Reserved.
関連記事
 自動運転車はステレオカメラだけで実現できる――「アイサイト」開発者に聞く
自動運転車はステレオカメラだけで実現できる――「アイサイト」開発者に聞く
自動運転車などに不可欠な自動車の周辺環境を検知するセンサーとしてステレオカメラが注目を集めている。ステレオカメラの第1人者で、富士重工業のステレオカメラを使った運転支援システム「アイサイト(EyeSight)」の開発にも携わった東京工業大学放射線総合センター准教授の實吉敬二氏にステレオカメラの可能性などについて聞いた。 1億3300万画素のイメージセンサー、8Kカメラの小型化を加速
1億3300万画素のイメージセンサー、8Kカメラの小型化を加速
NHK技術研究所は、1億3300万画素のイメージセンサーを開発した。1枚(単板)で、フル解像度(7680×4320画素)のスーパーハイビジョン(8K)映像を撮影できるので、カメラの小型化を実現する。 車載CMOSセンサーで「業界初」の裏面照射型、オムニビジョンがADAS向けに開発
車載CMOSセンサーで「業界初」の裏面照射型、オムニビジョンがADAS向けに開発
OmniVision Technologies(オムニビジョン)が、車載CMOSセンサーでは「業界初」(同社)となる裏面照射型の製品「OV10640」と、OV10640のコンパニオンプロセッサ「OV490」を発表。バックモニターやサラウンドビューに加えて、先進運転支援システム(ADAS)に最適だとする。