幚慔両 偛庡恖條偲儊僀僪偑僗僥僢僺儞僌儌乕僞乕傪摦偐偡丗峕抂偝傫偺DIY暠摤婰 EtherCAT偱儂乕儉僙僉儏儕僥傿僔僗僥儉傪嶌傞乮7乯乮4/7 儁乕僕乯
偝偰丄崱夞偼丄慜夞偵懕偒EtherCAT偺乬2戝媄岻乭偺1偮偱偁傞乽SyncManager乿傪夝愢偟偨偄偲巚偄傑偡丅偦偺屻丄僗僥僢僺儞僌儌乕僞乕傪摦偐偡偨傔偺僾儘僌儔儉傪嶌惉偟偰傒傑偟傚偆丅
EtherCAT偱僗僥僢僺儞僌儌乕僞乕傪夞偡
丂偱偼丄傛偆傗偔偙偙偐傜丄EtherCAT偱僗僥僢僺儞僌儌乕僞乕傪夞偡僾儘僌儔儉偺嶌惉偵擖傝傑偡丅偙偺僾儘僌儔儉偼SOEM偱摦偐偡儅僗僞梡偺傾僾儕働乕僔儑儞偲側傝傑偡丅
丂SOEM偺傾僾儕働乕僔儑儞傪丄僗僋儔僢僠偐傜嶌傞偺偼戝曄側偺偱丄Microsoft Visual C++偺拞偺simple_test乭僾儘僕僃僋僩偺拞偵偁傞丄乭simple_test.c乭傪夵憿偟偰嶌偭偰偟傑偄傑偟傚偆丅
丂傑偢丄慜採偲偟偰丄乽SOEM偺僨僶僢僌仌僩儗乕僗娐嫬偺嶌傝曽乿偑姰椆偟偰偄傞傕偺偲偟傑偡乮嶲峫乯丅
丂Simple_test偺僾儘僕僃僋僩傪乽僗僞乕僩傾僢僾僾儘僕僃僋僩偵愝掕乿偟偰丄幚峴偟偰傒偰偔偩偝偄乮simple_test.c偼丄傑偩夵憿偟傑偣傫乯丅
丂偙偺抜奒偱丄偁側偨偺巊偭偰偄傞DI/DO偺EtherCAT偺僗儗乕僽偺LED偑丄僺僇僺僇偲揰柵偟偰偄傟偽栤戣偁傝傑偣傫丅
丂傕偟丄揰柵偟偰偄側偗傟偽丄愭傎偳偺乽slaveinfo.exe偺昞帵乮慜夞暘偛嶲徠乯乿偵婰嵹偝傟偰偄傞丄儊儌儕偺愭摢傾僪儗僗偺抣乮椺丗乽IOMap:01257D80乿乯偲丄僗儗乕僽1偺弌椡僨僕僞儖I/O梡偺傾僪儗僗乮椺丗乽Outputs 01257D84乿乯傪挷傋偰偔偩偝偄丅揰柵偟偰偄側偄偺偱偁傟偽丄抣偑堎側偭偰偄傞僴僘偱偡丅偙偺嵎暘傪媮傔偰偍偄偰偔偩偝偄丅
丂忋婰偺椺偱偡偲丄嵎暘偼丄01257D84 - 01257D80 = 4 偲側傝傑偡丅
丂師偵丄simple_test.c偺丄嵟弶偺晹暘偵偁傞丄乭void CALLBACK RTthread乮乧乯
偺拞偵偁傞丄乭IOmap[0]++;乭 偺乭0乭傪忋婰偺抣乮椺丗乭4乭乯偵擖傟懼偊偰偔偩偝偄丅
乮椺丗"IOmap[0]++;"仺IOmap[4]++;乭乯
丂偙傟偱丄嵞搙僐儞僷僀儖偟偰幚峴偡傟偽丄LED偺揰柵偑妋擣偱偒傞偲巚偄傑偡丅
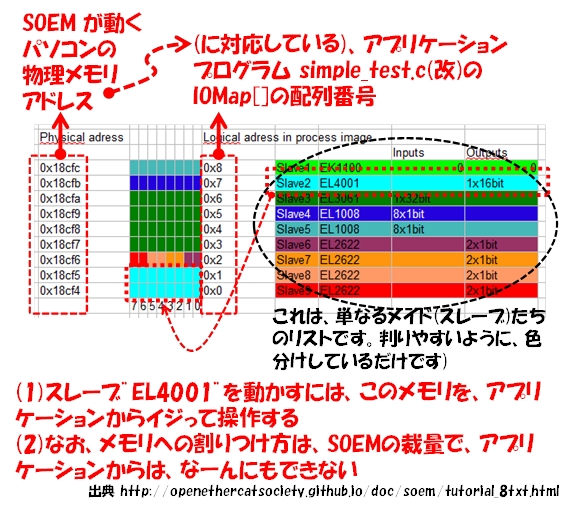
丂偙傟偑愭傎偳怽偟忋偘偨丄乽PC偺儊儌儕傾僪儗僗乽01257D80乿偐傜嵟弶偺2僶僀僩乮偺偆偪嵟弶偺8價僢僩乯偑丄弌椡梡丄師偺2僶僀僩乮偺偆偪嵟弶偺8價僢僩乯偑擖椡梡偲暘偐傟偽丄偦傟偱懌傞偺偱偡乿偺堄枴偱偡丅
丂乬simple_test.c乬偑丄EtherCAT僗儗乕僽傪惂屼偡傞儊儌儕偺斣抧乮椺丗乭IOMap[4]乭乯偝偊暘偐偭偰偟傑偊偽丄偁偲偼丄偦偺乭 "IOMap[]"偺拞恎傪彂偒曄偊偰傗傞偩偗偱丄EtherCAT僗儗乕僽偼摦偒弌偟傑偡丅
丂壗偼偲傕偁傟丄偲偵偐偔丄壗偑壗偱傕丄偙偺抜奒偱僗儗乕僽偺LED偺僺僇僺僇揰柵傪妋擣偟偰偔偩偝偄丅偙傟偑揰柵偟側偐偭偨傜丄偙偙偐傜愭偵恑傔傞偙偲偑偱偒傑偣傫丅
丂偝偰丄嵟屻偵丄偙偺儅僗僞偺傾僾儕働乕僔儑儞乮椺丗simple_test.c乯偱巊傢傟傞乭IOMap[]乭偺撪梕傪乮杮摉偵丄壗搙傕偟偮偙偄偱偡偑乯傕偆堦搙偩偗丄偍偝傜偄偟偰傒傑偟傚偆丅
丂儅僗僞偲僗儗乕僽偑嫤椡偟偰丄偆傑偄偙偲儅僗僞乮SOEM乯偺儊儌儕傪柍懯偵巊傢側偄傛偆偵丄僷僢僉儞僌偟偰偄傞偺偑暘偐傝傑偡丅
Copyright © ITmedia, Inc. All Rights Reserved.