人の思考を読み取る? 次世代のスマート義肢:脳内“エラー信号”を利用(2/2 ページ)
脳波で動かす義肢の開発は、長年にわたり進められてきた。今回、スイスのローザンヌ工科大学(EPFL)は、脳が何らかの情報を“誤り”だと認識した場合に発せられる電位「ErrP(Error-related Potential)」を使って、義肢など人工装具を操作する方法を開発した。人工装具を思い通りに動かすことが、これまでよりも格段に簡単になる可能性がある。
治療法の“パラダイムシフト”が起こる?
Millán氏の研究グループの専門分野であるBMI(Brain Machine Interface)は、これまでにも数多くの患者をサポートしてきた。今回、ErrP信号を利用することにより、BMIのこれまでの成果が、世界中の何千人もの患者に広がっていくことになるだろう。特に、英国の高名な理論物理学者であるStephen Hawking(スティーブン・ホーキング)氏のように、筋萎縮性側索硬化症(ALS)を患っている人々にもサポートが拡大していくとみられる。
EPFLが開発中の人工装具は、患者の脳からErrP信号が放出されている限り、患者の命令を実行するための学習を行うことができるという。
ErrP信号を検出することで実現する次世代のBMI技術では、脳波(EEG)などのように、脳活動の全領域を感知する必要がないため、機器の構造を簡素化できる可能性がある。また、無意識に放出されているErrP信号を検出するだけで、EEGを使った学習では不可能とされていた複雑な動きも実現できるようになるという。
Millánは自身の発明を、「治療法における“パラダイムシフト”」と呼ぶ。同氏は、ErrP信号を使った義足などで、ErrP信号を受信するたびにその信号パターンを学習し続け、最終的には、患者が思う通りに正しく動かせるようになることを目指すという。
ロボットアームを使った実験も
EPFLでは、ロボットアームを使った実験を行った。被験者には、特定の位置にある対象物を認識してもらい、それをロボットアームにその対象物がある位置を正しく指摘させるというものだ。ロボットが間違った位置を指すと、ErrP信号が出るので、ErrP信号が出ない位置をロボットが探していくことになる。ロボットアームと被験者は、約2m離れている。この実験では、ロボットアームが「正しい対象物の位置はどこなのか」を学習するのにかかった時間は平均25分だったという。
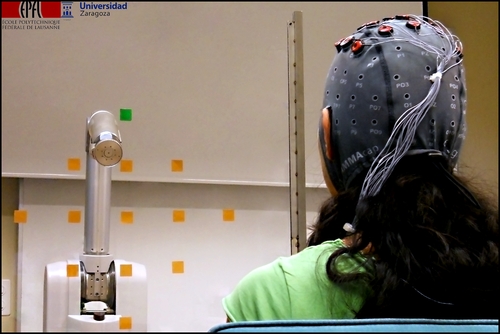
ErrP信号を使って、ロボットアームは、対象物の正しい位置がどこかを“学習”するという。画像内の緑の小さな四角が「正しい対象物」。ロボットアームはオレンジの四角をたどりながら、「正しい対象物」を探していく 出典:EPFL
この方法は、脳波を解釈しなくてはならない従来の方法に比べて、より多くの人々に使われるようになる可能性がある。
詳細に関しては、英国科学誌「Nature(ネイチャー)」の姉妹誌であるオンラインジャーナル「Scientific Reports」が無償で公開している論文「Teaching brain-machine interfaces as an alternative paradigm to neuroprosthetics control(人工神経制御の代替パラダイムとしてのBMI教育)」を参照いただきたい。
【翻訳:田中留美、編集:EE Times Japan】
Copyright © ITmedia, Inc. All Rights Reserved.
関連記事
 細胞の“ゆらぎ”を利用すれば超省エネマシンができる!? ――CiNetの研究開発
細胞の“ゆらぎ”を利用すれば超省エネマシンができる!? ――CiNetの研究開発
生体が超省エネで活動できる理由は、細胞の“ゆらぎ”にあるという。ゆらぎを応用すれば、非常に低い消費電力で稼働するシステムを実現できるかもしれない。脳情報通信融合研究センター(CiNet)の柳田敏雄氏が、「NICTオープンハウス2014」の特別講演で語った。 脳波で家電を操作、ALS患者向けのソフトウェア
脳波で家電を操作、ALS患者向けのソフトウェア
フィリップスとアクセンチュアが、脳波で家電を操作するソフトウェアを開発した。脳波測定機器とタブレット端末、ウェアラブルディスプレイを接続し、照明やテレビの操作や、メールの送信などを行う。筋肉の萎縮などが起きるALS(筋萎縮性側索硬化症)患者など、身体にまひを持つ患者が暮らしやすい環境の実現を目指す。 脳波の利用が進むヘルスケア分野、総合医療展でも高い注目度
脳波の利用が進むヘルスケア分野、総合医療展でも高い注目度
ストレスの解消や、メンタルヘルスの診断など、ヘルスケア分野で脳波の活用が広がっている。東京ビッグサイトで開催中の総合医療展「IMEC 2014」でも、脳波を利用したヘルスケア製品に注目が集まっていた。 “気になる瞬間”を自動で記録、脳波センサーと連動するウェアラブルカメラ
“気になる瞬間”を自動で記録、脳波センサーと連動するウェアラブルカメラ
カメラと脳波センサーを連携し、「気になるもの」「興味があるもの」を自動で撮影する――。脳波を利用したアプリケーションの開発を手掛ける電通サイエンスジャムが、そんなデモを披露した。