力触覚通信を35mm角のボードで実現:次世代のロボットアームを目指す(2/2 ページ)
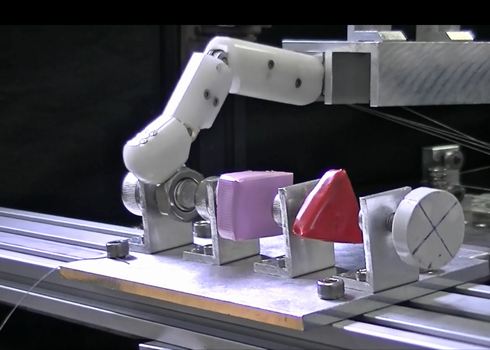
慶応義塾大学ハプティクス研究センターは「CEATEC JAPAN 2016」(2016年10月4〜7日/幕張メッセ)で、ロボットアームの位置情報・力情報を遠隔に伝える「力触覚通信」技術のデモを行った。同研究センターは、この力触覚通信技術を試作品などに手軽に実装できるよう、35mm角の小型ボードを開発、それもCEATECで披露した。
小型のボードを開発
2015年のCEATEC以降、2つの大きな進展があった。1つは力触覚技術を実現するための小型ボードを開発したことだ。サイズは35mm角で、コアとエンジンを搭載。力触覚の再現に必要な計算処理を行う。これをロボットアームなどに組み込むことで力触覚技術を実現できる。このボードは、GP-Armにも搭載されている。野崎氏によると、力触覚通信技術を使ってみたいなどの反響が多かったため、同技術を使った試作機などを作りやすいよう、ボードを開発したという。

2つ目は、力触覚技術について十数社の企業と共同開発を始めるための体制作りを整えたことである。野崎氏によると、十数社は産業機器、ロボット、自動車、農業、建設、医療/福祉など、さまざまな分野の企業だという。ハプティクス研究センターはこれらの企業と個々に製品の開発を目指す。このうち3社とは、概念実証(POC:Proof of Concept)レベルの開発が完了していて、製品化の段階に入っている。この他、ベンチャー企業の立ち上げも今後1〜2年以内に予定している。
動作の「保存」「編集」が可能
この技術の面白いところは、力触覚情報だけに基づいて動作を再現するので、“動作を保存して編集し、再生することができる”という点である。力触覚情報は、上述した通り、位置情報と力情報で構成されている。人間の動作について、これらの数値データを保存しておけば、データを編集してロボットアームのコントローラーに書き込むだけで、思い通りの動きを再現できるようになる。倍速で動作を再生したり、逆再生したりすることも可能だ。
例えば「ネジを締める」という動作を10倍速で再生すれば、人間の10倍のスピードでネジを締めることができる。この動作を逆再生すれば、「ネジを緩める」ことも可能だ。
 クリックで動画に飛びます(動画提供:慶応義塾大学ハプティクス研究センター)
クリックで動画に飛びます(動画提供:慶応義塾大学ハプティクス研究センター)
Copyright © ITmedia, Inc. All Rights Reserved.
関連記事
 「タコ」なのか、柔らかロボを作り出す
「タコ」なのか、柔らかロボを作り出す
米Harvard Universityの研究チームは、2016年8月24日、硬い部分を持たないタコ型のロボット「octobot」を試作したと発表。内部の化学反応によってエネルギーを得て自律的に動き、この化学反応が制御装置を兼ねていることが特徴だ。エンベデッド3Dプリント技術を応用して作り上げた。 スパイラル学習法でドローンを自動操縦
スパイラル学習法でドローンを自動操縦
Preferred Networksは、「CEATEC JAPAN 2016」(シーテック ジャパン、会期:2016年10月4〜7日、会場:千葉市幕張メッセ)で新たな深層強化学習手法を用いて実現したドローンの自動操縦システムのデモを公開する。 虹彩認証でスマホのパスワードが不要に
虹彩認証でスマホのパスワードが不要に
Tessera Technologiesの完全子会社である米FotoNationは、一連の新しい生体認証アルゴリズムを開発したと発表した。顔認識および虹彩認識技術を適用することで、スマートフォンのパスワードを不要にすることが可能だという。 ロボットに人間並みの触覚機能を与えるセンサー
ロボットに人間並みの触覚機能を与えるセンサー
立命館大学などは、「国際ナノテクノロジー総合展・技術会議」で、垂直力とせん断力を区別して検出できるセンサーを展示した。介護や産業用ロボットに、人間並みの触覚を与えられるという。 Li二次電池の非破壊検査、磁気センサーを活用
Li二次電池の非破壊検査、磁気センサーを活用
セイコーNPCは、2016年9月28〜30日に東京ビッグサイトで開催されている「センサエキスポジャパン2016」で、リチウムイオン二次電池の非破壊検査について参考展示を行った。 ルービックキューブを3秒で解く! レゴロボット「CUBESTORMER 3」
ルービックキューブを3秒で解く! レゴロボット「CUBESTORMER 3」
ARMのエンジニアらが余暇を利用して開発したレゴロボットが、ルービックキューブを3.253秒で解き、世界最速記録を達成した。頭脳部分には、8コアプロセッサを搭載したSamsung Electronicsのスマートフォン「GALAXY S4」が使われている。