ゆっくり歩き、速く走る「ロボット結晶」を開発:ソフトロボット実現へ
早稲田大学の研究グループらは、歩いたり走ったりして移動することができる「ロボット結晶」を開発した。その推進力を発生させるメカニズムも明らかにした。
結晶外形の非対称性が、移動の推進力を生む
早稲田大学ナノ・ライフ創新研究機構の小島秀子研究院客員教授らによる研究グループは2018年2月、歩いたり走ったりして移動することができる「ロボット結晶」を開発したと発表した。微小領域で物資輸送などを行う新方式のソフトロボットを実現することが可能となる。
今回の研究成果は小島氏の他、早稲田大学理工学術院の朝日透教授、谷口卓也同大学大学院先進理工学研究科4年/日本学術振興会特別研究員(DC2)らの研究グループと、東京工業大学理学院の植草秀裕准教授らによるものである。
小島氏はこれまで、アゾベンゼンやサリチリデンアニリンなど、光の影響によって曲がるメカニカル結晶を開発してきた。これらの結晶は、その場で屈曲や伸縮を行うのがほとんどであった。
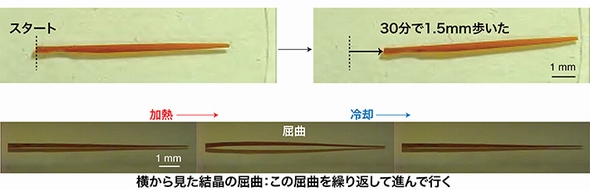
今回用いたのは、新たに開発したキラルアゾベンゼン結晶である。この結晶は145℃で相転移し、加熱と冷却を繰り返し行っても結晶は壊れないことが分かった。実験では細長い板状結晶をホットプレート上に置き加熱していった。熱伝導によって結晶が温められて相転移し結晶構造が変化する。まずは結晶下部から長さが縮む。この時点で相転移温度に達していない上部は長さが変わらず、結晶全体で屈曲が生じた。
左右の厚みが異なる板状結晶を用いて、相転移点前後で加熱と冷却を繰り返し行った。そうすると結晶は屈曲を繰り返し、尺取り虫のようにゆっくりと歩くことが分かった。板状結晶の厚みを薄くすると、加熱あるいは冷却を1回行うだけで、結晶は高速で走りだした。顕微鏡下で結晶の動きを高速撮影したところ、その速度は秒速15mmで、歩く速さ(秒速0.0008mm)に比べて2万倍も速いという。
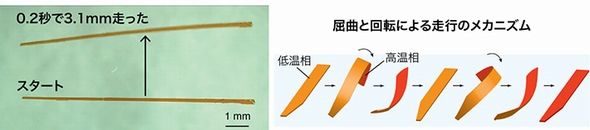
今回の研究では、2つの異なる移動モードを実現した。結晶が屈曲を切り返しながら尺取り虫のようにゆっくり歩いたり、屈曲した結晶が転がりながら高速に走ったりする動きである。しかも、こうした移動を生じさせる力が、結晶外形の非対称性から発生していることも明らかにした。
小島氏らは今回の研究成果について、「移動する結晶は、微小領域での物質輸送などを担うマイクロロボットとして実用化できる可能性がある。自律的に移動できるこの有機結晶は、軽くてしなやかで耐久性もあるため、ソフトロボットの材料として有用」とみている。ソフトロボットへの適用に向けた今後の課題としては、結晶が移動する方向や速さを精密に制御する技術や、もう少し低い温度で相転移する新しいロボット結晶の開発などを挙げた。
Copyright © ITmedia, Inc. All Rights Reserved.
関連記事
 新しいダイヤモンド量子発光体、東工大らが作製
新しいダイヤモンド量子発光体、東工大らが作製
東京工業大学工学院電気電子系の研究グループは、スズ(Sn)を導入したダイヤモンドを高温高圧環境で処理することにより、スズと空孔(V)が結びついた新しい発光源(SnVカラーセンター)を形成することに成功した。量子ネットワークへの応用に期待できるとする。 安価で汎用的な固体電解質材料を発見
安価で汎用的な固体電解質材料を発見
東京工業大学の菅野了次教授らの研究グループは2017年7月、全固体リチウムイオン電池の実用化を加速させる可能性があるという新たな固体電解質を発見したと発表した。 東工大、燃料電池の反応生成液水の挙動を可視化
東工大、燃料電池の反応生成液水の挙動を可視化
東京工業大学の平井秀一郎教授らは、作動している燃料電池内の反応生成液水の挙動を、ミクロン単位の高い解像度でリアルタイムに可視化できる技術を開発した。 テラヘルツレーザー照射で波長変換効率5割増し
テラヘルツレーザー照射で波長変換効率5割増し
テラヘルツレーザー光を酸化物セラミックス結晶に照射すると、室温で第二次高調波(SHG)強度が5割以上増大する――。この現象を東京工業大学と京都大学の共同研究グループが発見した。巨大データ高速処理に必要な超高速光電子デバイス開発への応用が期待できる。 調光範囲を自由に変えられる、新型調光ガラス
調光範囲を自由に変えられる、新型調光ガラス
物質・材料研究機構(NIMS)は早稲田大学や多摩美術大学と共同で、グラデーション変化する調光ガラスを開発した。「遮光」と「眺望」を両立できる窓を実現することができる。 貼るウェアラブル実現へ、熱処理いらぬ封止技術
貼るウェアラブル実現へ、熱処理いらぬ封止技術
早稲田大学は、高分子ナノシートを利用し、熱処理を行わずに電子素子を固定する封止技術を開発した。開発した封止技術を用い皮膚に貼り付けるウェアラブルデバイスを試作し、柔軟な生体組織表面でも安定的に通電できることを確認したという。