確率共鳴でLiDARを改善、遠距離も高精度に認識:自動運転で物体検知の能力向上
芝浦工業大学システム理工学部機械制御システム学科の伊東敏夫教授は2018年7月、「確率共鳴」という現象を利用し、物体を識別できる距離を延ばすことが可能な技術を開発したと発表した。自動運転システムに応用すると、より遠くの物体を高い精度で検知することが可能となる。
共同プロジェクトで2020年の実用化目指す
芝浦工業大学システム理工学部機械制御システム学科の伊東敏夫教授は2018年7月、「確率共鳴」という現象を利用し、物体を識別できる距離を延ばすことが可能な技術を開発したと発表した。自動運転システムに応用すると、より遠くの物体を高い精度で検知することが可能となる。
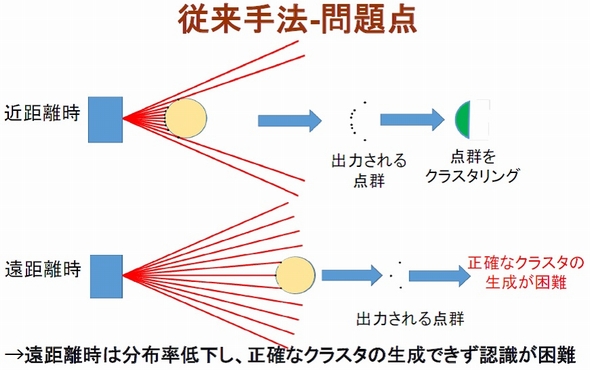
自動車の自動運転システムでは、LiDAR(ライダー)を用いて歩行者などの物体認識を行うことが有力視されている。ところがこの方法だと、遠距離になればなるほど物体の認識は、精度が低くなる。
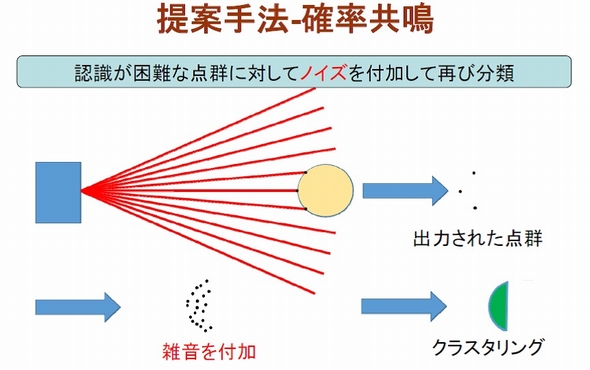
そこで伊東氏は、「確率共鳴」という現象を利用した。これは、信号に最適化したノイズを印加すると、ある確率で信号が強まり、検知能力を高めることができる技術である。これにより、LiDARの遠距離認識性能を改善したり、遠距離での反射点群密度を向上させたりすることが可能となった。
開発した手法を用い、計測地点から20〜80m離れた場所に位置する歩行者や二輪車、車両を検知する実験を行い、認識性能が改善されることを確認した。
開発した技術は、自動車の他、自動運転ドローンや自律移動ロボットなどの用途で、周囲の環境を認識する外界センサーとしての応用が可能である。また、確率共鳴の現象をLiDAR以外の画像処理やレーダーに応用することも視野に入れる。
伊東氏は、シニアカーに今回の技術を搭載した「自律移動モビリティ」を開発、共同プロジェクトによる研究活動を行い、2020年にも自動運転技術の実用化を目指す予定だ。

Copyright © ITmedia, Inc. All Rights Reserved.
関連記事
 三菱電機、6.5kV耐圧のフルSiCモジュールを開発
三菱電機、6.5kV耐圧のフルSiCモジュールを開発
三菱電機は2018年1月31日、シリコンによる従来のパワー半導体モジュールよりも定格出力密度を1.8倍に高めた6.5kV耐圧フルSiCパワー半導体モジュールを開発したと発表した。ダイオードを内蔵したSiC-MOSFETを採用し、小型サイズを実現している。 東芝 柴田氏が語るIoT/CPS時代に向けた重要技術
東芝 柴田氏が語るIoT/CPS時代に向けた重要技術
東芝 研究開発センター技監の柴田英毅氏は、2017年2月に開催された「第4回グリーンイノベーションシンポジウム」で、IoT/CPS実現に向けたMore than Mooreについて講演を行った。本記事では、エナジーハーベスト(環境発電)とストレージ技術に関する講演部分を紹介する。 地図とOTA、自動運転の核心技術を押さえる「HERE」
地図とOTA、自動運転の核心技術を押さえる「HERE」
高精度地図データの提供を行うHEREは2018年5月22日、グローバルでの高精度地図提供を目的とした企業間アライアンス「OneMap Alliance」の結成と、自動車に搭載されるソフトウェアのアップデートや機能追加を無線環境で実現するOTA(Over the Air)ソリューション「HERE OTA Connect」を発表した。 自動運転技術の新たな競争を仕掛けたNVIDIA
自動運転技術の新たな競争を仕掛けたNVIDIA
アイティメディアがモノづくり分野の読者向けに提供する「EE Times Japan」「EDN Japan」「MONOist」に掲載した主要な記事を、読みやすいPDF形式の電子ブックレットに再編集した「エンジニア電子ブックレット」。今回は、自動運転車向けSoC「DRIVE PX Pegasus」の発表から浮かぶ、NVIDIA車載事業の狙いをみていきます。 自動運転、カーシェア……車の未来を照らすスタンレー
自動運転、カーシェア……車の未来を照らすスタンレー
自動車のヘッドランプを始めとして、各種の光デバイスに関して高い技術力を持つスタンレー電気。同社で先進技術担当取締役を務める貝住泰昭氏に、未来の自動車で生まれる光デバイスのビジネスチャンスを聞いた。 XilinxがDaimlerと協業、「自動運転の主役はFPGA」
XilinxがDaimlerと協業、「自動運転の主役はFPGA」
Xilinxは2018年6月26日(米国時間)、Daimler AGと自動運転などの車載システム開発で協業すると発表した。Xilinxの車載プラットフォームをDaimler AGに提供し、Mercedes-Benzブランドの市販車に搭載する予定だ。