「タコ」なのか、柔らかロボを作り出す:化学で論理回路を実現(3/3 ページ)
米Harvard Universityの研究チームは、2016年8月24日、硬い部分を持たないタコ型のロボット「octobot」を試作したと発表。内部の化学反応によってエネルギーを得て自律的に動き、この化学反応が制御装置を兼ねていることが特徴だ。エンベデッド3Dプリント技術を応用して作り上げた。
エレクトロニクス部品を使わない
octobotは、エネルギー源としてはもちろん、制御用にもエレクトロニクス部品を使っていない。実は柔構造トランジスタなどの試作が一般に進んでおり、必ずしも今回排除する必要はなかった。だが、octobotは化学的に動力を得ているため、「化学回路」による制御を試みた形だ(図4)。

図4 octobotの動作は頭部に内蔵する微小流体制御装置によって決まる 赤紫色のインクがoctobot内部のパイプ状の構造を示している。頭部では立体的なパイプ構造が回路を形成していることが分かる 出典:Lori Sanders/ Harvard University
試作した化学回路は、エレクトロニクス用語で表現すると2個のトランジスタと2個のキャパシタを用いた非安定マルチバイブレーター(発振器)と等価だ。この発振器はoctobotの柔軟な制御装置に流路として実装されている。
octobotの管系は大きく4つの部分からなる。液体燃料貯蔵室と燃料調整器(発振器)、触媒を備えた反応室、ガス作動部と排出部だ(図5)。
液体燃料貯蔵室は2つあり、それぞれ0.5mLの燃料を蓄える。貯蔵室以下の装置も全て2つ備わっており、ピンチ弁を中心とする燃料調整器が2系統の流路を自律制御する。それぞれの系統に足が4本ずつ接続されており、足の互い違いの動きを実現する。
燃料調整器には毎分40μLの燃料が流れ込み、6.4mLのガスが生成する。従って、計算上は12.5分間動作し続ける。
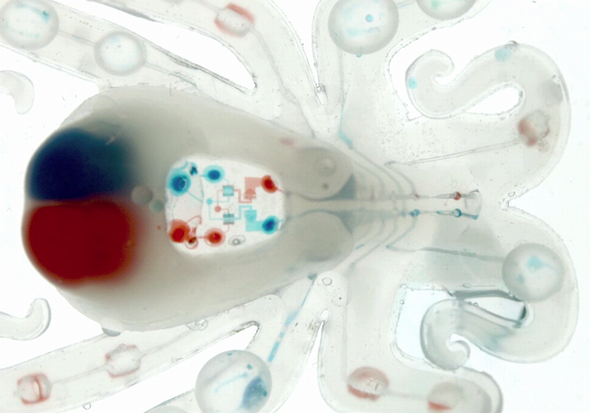
図5 octobotの制御装置とアクチュエーター 2つの系統を赤と青の燃料で塗り分けた。頭部の中にある明るい複雑な部分が制御装置に相当する。制御装置の左下と左上に見えるごく小さな円形の構造が燃料注入口だ。比較的大きな燃料貯蔵室は制御装置の左側に見えている。ピンチ弁は制御装置の中央、上下に並んだ正方形の部分だ。放出確認バルブ(カギ型)はダイオードに相当する部品。触媒部は制御装置の右側に見える細い線状の部位にある。触媒部で酸素が発生し、透明に見えている管を通って、1系統当たり4本の足を駆動する。足のない部分で左に向かって突き出しているのは排気口 出典:Lori Sanders, Ryan Truby, Michael Wehner, Robert Wood, and Jennifer Lewis/Harvard University
自律制御の内容はこうだ。2系統を図5に従って青系統、赤系統としよう。液体燃料貯蔵室からは青、赤どちらの系統にもほぼ同じ圧力がかかる。圧力は燃料の消費に従い、時間の経過に応じて下がっていく。2つの系統には同じ量の液体燃料が通過するはずだ。ところが、例えば図5のように赤系統の流量がわずかに多いと、赤系統のピンチ弁(図5の下側)が青系統の管を締め付ける形となり、青系統には燃料が流れなくなる。こうして、赤系統以下の4本の足だけが動く。
時間が経過すると赤系統の燃料の圧力が下がってくる。すると今度は青系統の燃料が流れ始め、赤系統の流量を絞る。こうして、2つの経路の燃料の流量が交互に最大値と最小値に達し、発生ガスの量、足の変位量へと連なっていく。
なお、燃料の流量やスイッチング周波数は、燃料貯蔵室の圧力と、放出確認バルブ以下のインピーダンスの関数になっている。
化学マイコン制御が可能に
octobotの動作はかなり限定的だ。動作も遅い。それでも構わない。なぜなら今回の試作は柔軟な部品だけを用い、外部制御機器や外部電源を使わない自律ロボットが可能であることを示す概念実証だからだという。
octobotの試作は概念実証にとどまらず、豊かな子孫を生み出す素になると研究チームは示唆している。なぜだろうか。
今回の研究では発振器による限定的な制御のみを取り入れた。しかし、エレクトロニクスでいう論理ゲートを流体で実現した他の研究チームによる先行研究が複数ある。NANDやNOR、XOR、XNORはもちろん、フリップフロップやゲインバルブを他の研究グループが試作済みだ。
これらの論理ゲートを組み合わせることで、理論的にはどのような「マイコン制御」も可能になる。例えば高い自由度を備えたアクチュエーターを運動制御することで、飛んだり、泳いだりできるだろう。アクチュエーター自体が備える弾力性を生かした設計も可能だ。人体の四肢が備えるような屈曲と伸展、外転と内転といった運動である。
最終的には、管系による動作を圧力センサーとして使うという戦略を思い描くこともできるという。真のクローズループフィードバックを備えた制御装置を実現できるということだ。このようにして環境と相互作用できるロボットに至るとした。
Copyright © ITmedia, Inc. All Rights Reserved.
関連記事
 7つの海で大活躍、水中ロボット最新事情
7つの海で大活躍、水中ロボット最新事情
最近は、多種多少な海洋ロボットが登場している。外観も小型船艇タイプからタコ型、カメ型までさまざまで、仕事内容もクラゲの捕獲からサンゴ礁の再生、監視活動の補助、難破船の調査まで幅広い。持ち運びが可能な水中ロボットまで登場している。世界各地の最新海洋ロボットを厳選して紹介しよう。 無線給電が一役買った、アイガモを救う“水田除草ロボット”
無線給電が一役買った、アイガモを救う“水田除草ロボット”
ビー・アンド・プラスは「ワイヤレス・テクノロジー・パーク2015」(WTP2015/2015年5月27〜29日)で、自社のワイヤレス給電技術のユニークな採用事例として、水田除草小型ロボットを紹介した。 細胞を模倣した微小容器のコンピュータ制御に成功
細胞を模倣した微小容器のコンピュータ制御に成功
東京工業大学は、化学反応をコンピュータで制御できる「人工細胞型微小リアクター」の開発に成功したと発表した。高機能な分子コンピュータなどに応用が期待される。 イカの動きがヒントに! ポケットサイズの制御機器を使った水中ロボット
イカの動きがヒントに! ポケットサイズの制御機器を使った水中ロボット
National Instruments(ナショナルインスツルメンツ)の年次テクニカルカンファレンス「NIWeek 2014」3日目の基調講演では、アカデミック分野へのNIの取り組みと成果が紹介された。中でも大きく取り上げられたのは、「Student Design Competition」で1位となったチューリッヒ工科大学のコウイカ型水中ロボットだった。 見て、聞いて、触って学ぶ! 人型ロボット「iCub」を公開――STマイクロ
見て、聞いて、触って学ぶ! 人型ロボット「iCub」を公開――STマイクロ
STマイクロエレクトロニクスは「組込み総合技術展/Embedded Technology 2014」(2014年11月19〜21日)で、イタリアの研究機関とともに開発した人間型ロボット「iCub」を展示した。 ロボット用センサーユニット、荷台をピタリと制御
ロボット用センサーユニット、荷台をピタリと制御
パナソニックのオートモーティブ&インダストリアルシステムズ社は、2016年7月19日に発表したロボットの姿勢検出、位置推定を行う「モーションセンシングユニット」の技術説明会を開催した。