30分で分かるCAN、設定とデザインのポイント:有線通信技術 CAN(2/2 ページ)
用途に応じてコントローラを使い分ける
CANコントローラには、ごく基本的な機能しか備えていないものから、マイコンにかかる負荷を下げるさまざまな機能を搭載したものまで、多くの種類がある。ここでは、各ベンダーが製造しているCANコントローラを大まかに3種類に分けて、それぞれの機能の違いを説明する。
ここでは、3種類のCANコントローラを仮に「Basic」、「Full」、「Extended full」と呼ぶことにする。Basic CANコントローラは、必要なメッセージを受け取り、不要なメッセージを無視するだけの、ごく基本的な機能を備える。単純な機能しか備えていないため、マイコンにかかる負荷は高くなりやすい(図3上)。
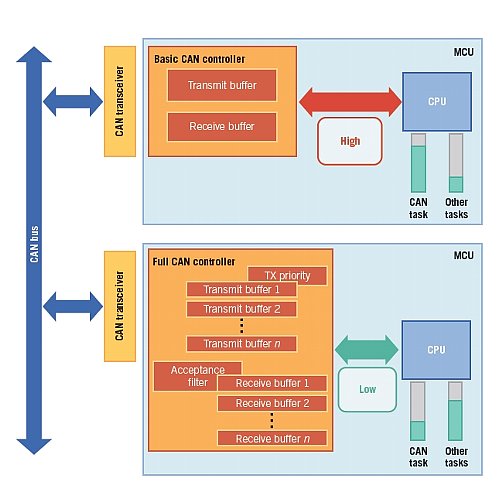 図3 Basic CANコントローラとFull CANコントローラの違い Basic CANコントローラはごく単純な機能しか備えていないが、Full CANコントローラはメッセージを蓄積するなどの機能を備える。
図3 Basic CANコントローラとFull CANコントローラの違い Basic CANコントローラはごく単純な機能しか備えていないが、Full CANコントローラはメッセージを蓄積するなどの機能を備える。Basic CANコントローラは、メッセージの受信、受信したメッセージの解析など、ことあるごとにマイコンへの割り込み信号を発生させる。マイコン上で動くソフトウェアでは、受信したメッセージのIDを見て、返信が必要かどうか判断し、必要ならば返信しなければならない。このように、Basic CANコントローラは、メッセージ通信が多く発生するとマイコンに高い負荷をかけることになる。データ転送速度を低く設定し、メッセージのやり取りがあまり発生しないところで使うべきだ。そうすることで、マイコンはCAN通信以外の処理に時間をかけられる。
Full CANコントローラは、必要なメッセージと不要なメッセージを振り分けるだけでなく、返信が必要なメッセージに返信を出す機能も提供する(図3下)。Basic CANコントローラのように、メッセージの返信でマイコンに負荷をかけないようになっている。
Full CANコントローラは、特定のIDのメッセージを受信したときだけマイコンへの割り込み信号を発生させるようにもできる。さらに、電子メールのメール・ボックスのように、複数のメッセージを保持しておくこともできる。マイコンは、貯まったメッセージをいつでも取り出せるが、同じIDを持つ同種のメッセージを再び受信する前に、メッセージが要求する処理を完了させなければならない。この点は、次に紹介するExtended Full CANコントローラを使うことで処理しやすくなる。
Extended Full CANコントローラは、Full CANコントローラの機能に加えて、受信したメッセージを貯めておくために、ハードウェアFIFO(First In First Out)キューを備える。こうすることで、マイコンに割り込みをかけることなく、同種の複数のメッセージを貯めておくことが可能になる。その結果、バスの速度が上がってもメッセージを取りこぼすことはなくなり、マイコンにかかる負荷が少なくなる。
ここで、1つ注意しておかなければならないことがある。DeviceNetでは、メッセージの振り分けに、IDだけでなく、データ領域の先頭2バイトまで使う。このような通信プロトコルを利用するときは、ここで説明したFull CANコントローラか、Extended Full CANコントローラに相当する機能を持つコントローラが必要になる。
やりとりするメッセージの種類にもよるが、Full CANコントローラとExtended Full CANコントローラを同じ基板に共存させることも可能だ。こうすることで、特定のメッセージの優先度を高くし、マイコンがメッセージを処理する効率を上げることができる。
例えば、障害に対応するためのメッセージを「0x250」というIDで受け取り、温度センサーの情報を「0x3FF」というIDが付いたメッセージで受け取るようになっている機器なら、障害対応に必要なメッセージをFull CANコントローラで受信し、温度情報のメッセージを4段のFIFOキューを備えるExtended Full CANコントローラで受信するように構成できる。
障害対応に必要なメッセージをFull CANコントローラに受信させることで、メッセージが届くたびにマイコンに割り込みを発生させて、すぐに処理させる。温度情報のメッセージは4つ貯まったところで処理するという考えだ。
1ビット1ビットを確実に認識する
CANの伝送速度は最大1Mビット/秒で、バスのケーブルは最大で1000mまで伸ばせ、配線の自由度が高い。ただし、ここまで伸ばすと伝送速度は最大50kビット/秒まで下がる。先ほど説明した機能の他、このような扱いやすさの点でもCANは高い評価を得た。
さらに、CANは耐障害性の面でも優れている。電気的雑音が多い環境で、1ビット1ビットを確実に認識するための仕組みを備えている。さらに、メッセージ送信失敗を検知する機能や、送信に失敗したメッセージの再送信機能を用意することで、耐障害性を高めている。
各ビットを確実に認識し、耐障害性を高めるために、CANでは1ビットの転送にかかる時間を細分化した。細分化することで、CANバスの状態に応じて、信号を認識するポイントを操作できる。
CAN上で1ビットを伝送する時間は、先頭から「Sync_Seg」、「Prop_Seg」、「Phase_Seg1」、「Phase_Seg2」の4つの期間に分けられる。この4つの期間の長さを操作することで、ビットを検知する時点(サンプル・ポイント)を前後に移動させることができる。
Sync_Segは、バスとの同期を取るために使う。バスにつながる機器は全てこの期間内で信号の送受信を始めようとする。言い方を変えると、信号の立ち上がり、立ち下がり(エッジ)がこの点にあることが望ましいということである。
Prop_Segは、ネットワークの遅延を吸収するための期間だ。ここを伸縮させることで、CANバスで発生する遅延や、バスからノードへの配線の遅延の影響を避けることができる。
Phase_Seg1とPhase_Seg2は、信号のエッジが早すぎたり、遅すぎたりしたときに、伸縮させる期間だ。信号を拾うサンプル・ポイントはPhase_Seg1の直後にあるので、例えば、エッジがSync_Segよりも遅いタイミングで来たときは、Phase_Seg1を伸ばし、Phase_Seg2を縮めることで、サンプル・ポイントをずらし、正確に信号を捉える。
CANコントローラによっては、Prop_SegとPhase_Seg1をまとめて、合計3つの領域でビットを認識するものもある(図4)。
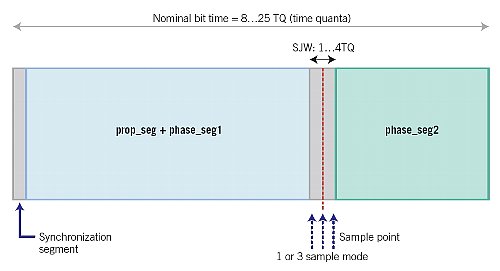 図4 CANでは、1ビットのデータを転送するのにかかる時間を複数の期間に分割する 図中左端の灰色の部分がSync_Seg。この長さは1TQと決まっており、変更はできない。その右がProp_SegとPhase_Seg1で、さらにその左はサンプル・ポイント。右端はPhase_Seg2。Phase_Seg1とPhase_Seg2の長さを伸縮させることで、サンプル・ポイントを調整できる。Phase_Seg1とPhase_Seg2の調整幅(SJW)の合計を1TQ〜4TQとしている。ネットワークを正しく動かすには、それぞれの期間の長さを適切に調整することが必要。
図4 CANでは、1ビットのデータを転送するのにかかる時間を複数の期間に分割する 図中左端の灰色の部分がSync_Seg。この長さは1TQと決まっており、変更はできない。その右がProp_SegとPhase_Seg1で、さらにその左はサンプル・ポイント。右端はPhase_Seg2。Phase_Seg1とPhase_Seg2の長さを伸縮させることで、サンプル・ポイントを調整できる。Phase_Seg1とPhase_Seg2の調整幅(SJW)の合計を1TQ〜4TQとしている。ネットワークを正しく動かすには、それぞれの期間の長さを適切に調整することが必要。CANでは、1ビット当たりの時間、つまり先に挙げた4つの期間を8〜25に細分化できる。細分化した1つ1つを「Time Quanta(TQ)」と呼ぶ。TQの実際の長さは、CANデータ転送速度から計算できる。
TQの最小値は1ビットの転送に必要な時間の1/25だ。例えば、データ転送速度が1Mビット/秒の場合、1ビットの転送に1μsかかるので、TQは最小で40nsということになる。
先に説明した、Sync_Seg、Prop_Seg、Phase_Seg1、Phase_Seg2のそれぞれの長さは規格で決まっている。TQで表現すると、Sync_Segは1TQ、Prop_Segは1TQ〜8TQ、Phase_Seg1は1TQ〜8TQ、そしてPhase_Seg2は2TQ〜8TQとなる。この範囲で、1ビットが合計8TQ〜25TQになるように設定する。ちなみに、Phase_Seg1とPhase_Seg2の調整幅の合計をreSynchronization Jump Width(SJW)と呼ぶ。
タイミング調整が要点
このように、4つの領域の長さは、多様な値を取り得る。ここで適切な値を設定できるかどうかが、耐障害性の高いCANネットワークを構築できるかどうかの分かれ目となる。設計者は、発振器の周波数だけでなく、問題が起こっているノードの送信遅延、そして他のノードの遅延まで想定してネットワークを構築する必要がある。
上記のようなタイミング調整には、機器のクロック周波数や、CANのデータ転送速度、そしてシステムごとに決められたサンプル・ポイントなど、さまざまな要素が関わってくる。このため、多くの設計者はこの仕事を嫌がるようだ。
CANネットワーク設計が複雑であるため、設計者や開発者は、古いマイコンとソフトウェア・ライブラリを再利用して新しい組み込み機器を開発しようとする。全ての要求を満たす、まったく別のよりよい方法があったとしてもだ。このような事情から、CANは「それはとりあえず動いているから、変に手を出したくない」といわれる類の技術となってしまっている。
10年以上使われている技術でありながら、CANは組み込み機器の設計では複雑な技術だと見られている。特に、研究開発の領域ではその傾向が強い。研究開発では、CANで幾つもの機器を接続して、機器の配置などの調整を繰り返す。CAN用のデバイス・ドライバの開発は専業ベンダーに外注できるが、仕様や設定の変更をあまり許してくれないベンダーもある。
最近は、半導体ベンダーがCANコントローラの設定機能を備えた開発ツールの提供を始めている。例えば、米Cypress Semiconductorのマイコン向けソフトウェア開発ツール「PSoC Creator」では、CANのメッセージに対応した割り込みの設定や、1ビット当たりの時間を簡単に設定できる(図5)。
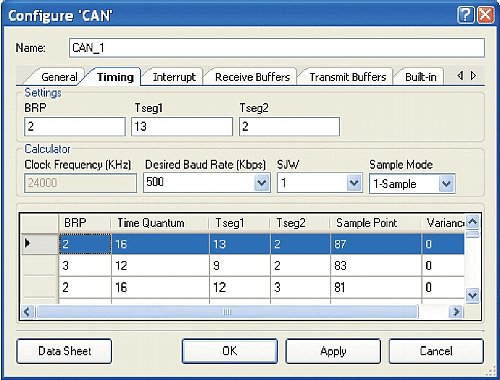 図5 PSoC CreatorでCANコントローラの機能を設定しているところ 1ビットの転送にかかる各期間の長さを設定している。
図5 PSoC CreatorでCANコントローラの機能を設定しているところ 1ビットの転送にかかる各期間の長さを設定している。このようなツールを使えば、組み込みソフトウェア開発を外注することなく、市場の要求に素早く応えて製品を開発、出荷できるようになるだろう。
筆者紹介
Hassane El-Khoury氏
米Cypress Semiconductorでsenior automotive business development managerを務める。車載機器の開発において8年間の経験を積んでおり、そのうち7年間はドイツContinental Automotive Systemsでlead design engineerとして電子制御のブレーキ装置の開発に携わった。米Lawrence Technological Universityで電気工学の学士号を取得し、米Oakland Universityでエンジニアリング・マネジメントの修士号を取得している。
Copyright © ITmedia, Inc. All Rights Reserved.
記事ランキング
- メモリ市場が大爆発 「5年の壁」を乗り越えられるか
- パワー半導体企業ランキング、日本勢は三菱電機ら5社がトップ20入り
- 米国でInnoscience製GaN販売禁止 Infineonへの特許侵害が確定
- 時価総額45兆円に キオクシア復活劇を支えたNAND戦略
- メモリ価格の上昇、鈍化へ 26年3QはDRAMもNANDも10%台
- マイクロン、AI需要で広島工場増強へ起工式 1.5兆円投資
- 世界半導体市場、26年5月は1206億ドル 日本も前年比23%増
- SK hynix、韓国内に118兆円投資 NASDAQ上場も目前
- メモリ起点に後工程へ本格参入 半導体の総合材料メーカー目指すADEKA
- onsemiが米国とフィリピンの2工場を売却 ファブライト推進
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。