Googleのスマホ「Tango」、NASAのロボットとともに宇宙へ飛び立つ:探査活動をサポート(1/2 ページ)
3Dスキャンをリアルタイムで行える、Googleのスマートフォン「Project Tango」。NASAが開発中の球体型ロボット「SPHERES」に取り付けられ、宇宙へ飛び立つ予定だ。高性能な撮影能力や画像処理能力を備えるProject Tangoは、SPHERESの活動を手助けする。
Googleの「Project Tango」は、Project Araから派生したプロジェクトである。Project Tangoは、画像処理プロセッサや深度センサー、モーショントラッキングカメラなどのハードウェアを搭載したスマートフォンで、正確なモーション/位置データを毎秒25万回取得して、撮影した空間の詳細な3Dモデルを構築する。
Project Tangoは、米航空宇宙局(NASA)が開発するボウリングボールサイズの球体型ロボット「SPHERES」に搭載され、2014年内に宇宙に打ち上げられる予定だ。なお、この球体型ロボットの正式名称は「Synchronized Position Hold, Engage, Reorient, Experimental Satellites」だが、頭文字を取ると「球体」を表わすSPHERESになる。
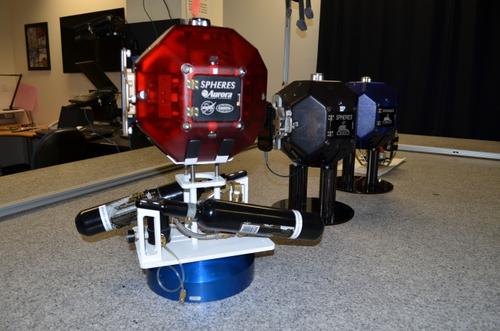 球体型ロボット「SPHERES」 出典:NASA
球体型ロボット「SPHERES」 出典:NASANASAは2003年から、国際宇宙ステーション(ISS:International Space Station)でSPHERESを使い、人工衛星の推進力や制御、ナビゲーション、自律操縦システムのテストを実施してきた。
SPHERESは遠隔制御や自律飛行が可能で、大型ロボットや人工衛星の制御テストを実施するために利用される。また、ISSのクルーをアシストしたり、人工衛星の外殻や衛星の軌道上の物体の調査、火星探査など、人間よりもロボットのほうが適している作業を行ったりもする。
NASAのWebサイトには、SPHERESの実験記録と結果、SPHERESの説明が掲載されている。同サイトの内容は、米マサチューセッツ工科大学(MIT)で航空工学の教授を務めるDavid W. Miller氏が監修している。同氏は1999年に行った講義で、映画「スター・ウォーズ」の中で、光線銃で武装した球体型のアンドロイドがルーク・スカイウォーカーのライトサーベルを浮遊しながら難なく避けるシーンを生徒に見せて、「このような球体型のロボットを実現してほしい」と言ったという。その後、MITの研究チームはそれを実現した。
SPHERESには当初、カスタム設計回路のみが搭載されていたが、2011年に、Samsung Electronicsが製造するAndroidスマートフォン「Nexus S」を拡張ポートで外部接続して、遠隔操作する実験が行われている。この実験では、SPHERESの内部操作以外のほとんどの操作をNexus Sで行った。
2011年のプレスリリースでは、MITのMiller氏が、「スマートフォンを取り付けることで、SPHERESは、動画や静止画を撮影できる内蔵カメラ、活動の手助けとなるセンサー、演算を行う高性能のプロセッサ、リアルタイムで指示やデータを送れるWi-Fiといった機能を得ることになる」と語っている。
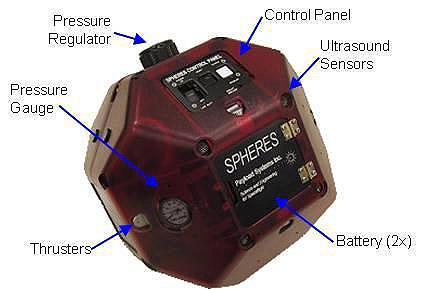 SPHERESの外観と構造 出典:NASA
SPHERESの外観と構造 出典:NASACopyright © ITmedia, Inc. All Rights Reserved.
記事ランキング
- ソニーが新画素構造「RB2×2 OCL」採用センサー 高解像度とAF性能を両立
- AIが食い尽くすメモリ供給 企業ITを揺らす価格高騰
- TSMC撤退の逆風越え、浜松に技術者集結――27年GaN内製化へ全力のローム
- 次世代チップ積層に関する3つの基盤技術を開発
- AmazonはNVIDIAに挑戦状を突きつけるのか
- 世界半導体市場が初の単月1000億ドル超え、26年4月
- 車載は「新たな成長段階に」 SiCパワー半導体市場、5年後110億ドル規模へ
- 宙に浮く透明な会議室? 村田製作所の新拠点から見る「オフィスの現在形」
- パッケージ基板の配線微細化と歩留まりを両立させる新製法
- 反りも割れも抑制 先端パッケージ向け多層セラミックコア基板
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。