最大362TFLOPSの「D1」チップなど、Tesla AI Dayハイライト:自動運転車用モデルのトレーニングを進化(3/3 ページ)
「Dojo」ソフトウェアと「DPU」
「Dojo」ソフトウェアは、大規模および小規模NNのトレーニングをサポートする。Teslaが提供するコンパイラは、トレーニングノードやD1チップ、トレーニングタイル、ExaPODシステムなどの構造や性能を活用することが可能なソフトウェアコードを作成するという。
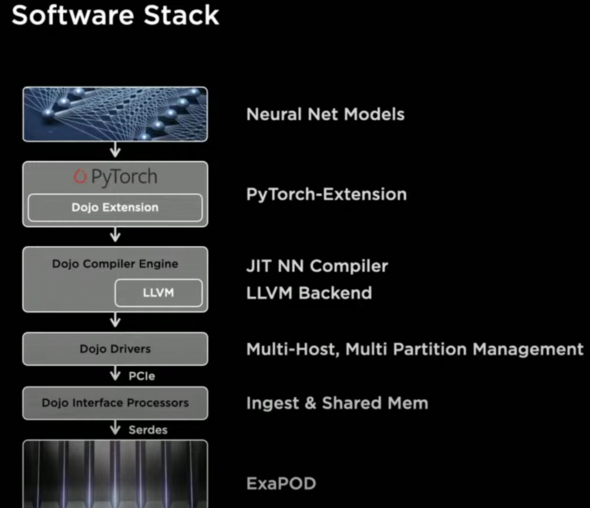 ソフトウェアタック 出所:Tesla
ソフトウェアタック 出所:Teslaこうした性能の実現により、大規模NNを分割してマップすることで、さまざまな並列処理や、モデル、グラフ、データ並列処理を抽出し、大規模NNのトレーニングを高速化することが可能になる。コンパイラは、複数の技術を利用して並列処理を抽出する。ネットワークを変形させることにより、データモデルグラフ並列処理技術を適用して細粒度並列処理を実現できる他、最適化してメモリフットプリントを削減することも可能だ。
Dojoのインタフェースプロセッサは、ITやデータセンターのホストコンピュータとの通信に使用する。PCIe 4.0でホストコンピュータに接続し、D1ベースのシステムには、前述の高帯域幅で接続する。またインタフェースプロセッサは、D1システム向けの高帯域幅DRAM共有メモリを提供する。
D1ベースのシステムは、「Dojo Processing Unit(DPU)」と呼ばれるユニットに分類/分割することが可能だ。DPUは、1個以上のD1チップと、1個のインタフェースプロセッサ、1個以上のコンピュータホストで構成される。DPUの仮想システムは、その上で動作するNNの必要に応じて、スケールアップまたはスケールダウンすることができる。
結論
TeslaのNNトレーニングチップ、システム、ソフトウェアは非常に素晴らしいものだといえる。チップからシステムへの驚異的な帯域幅と低レイテンシの保持など、多くのイノベーションがある。電源や冷却のためのトレーニングタイルのパッケージングも革新的だ。
NNのトレーニングシステムはデータセンター用で、テスラの自動運転ソフトウェアの改良に使われることは間違いなく、他社でも使用される可能性がある。
重要なのは、NNシステムが自動運転用の推論アプリケーションにどのように使われるか、ということだ。トレーニングタイルの消費電力は、現在のバージョンではクルマ用としては高すぎるようだ。発表用プレゼン資料の写真には、トレーニングタイルに「15KW Heat Rejection」というラベルが貼られていた。D1チップ1個であれば、スライドに記載されているTDPが400Wなので、その範囲内だといえるだろう。
Teslaは、このNNトレーニングの技術革新によって、カメラベースのセンサーだけでオートパイロットをレベル3、レベル4に対応させることに期待(あるいは依存)しているようだ。これは良い賭けだろうか? 時が経てば明らかになることだが、これまでMusk氏の賭けのほとんどは、多少の遅れはあるものの、良い結果を出している。
【翻訳:田中留美、青山麻由子、編集:EE Times Japan】
関連記事
 「Tesla Bot」に対する米国の反応は
「Tesla Bot」に対する米国の反応は
ヒューマノイドロボット(人間型ロボット)の支持率は、人気のない米大統領とほぼ同じくらいだ。 “AIの安全性”は確保できるのか
“AIの安全性”は確保できるのか
Teslaのロボットアシスタントの派手なお披露目は、AI(人工知能)の安全性や、自動システムが街中の道路や工場のフロアの上に解き放たれる前にそれをどのようにテスト、検証できるかに関する継続中の議論に拍車を掛けた。 MagnaのVeoneer買収でADAS技術の勢力図は変わるのか
MagnaのVeoneer買収でADAS技術の勢力図は変わるのか
カナダの自動車部品メーカーであるMagna International(以下、Magna)が2021年7月、Veoneerを買収することで両社が最終的な合意に至ったと発表した。これにより、人間をより安全なドライバーにするための技術を活用していくという傾向が、さらに顕著に明示されたといえる。今回の買収の背景にあるとみられる根拠について、取り上げていきたい。 ムクドリの群れから考える、自動運転の課題
ムクドリの群れから考える、自動運転の課題
他ならぬTeslaのCEOであるElon Musk氏も、自動運転が難しいことを認めている。同氏は最近Twitterに「これほど難しいとは思っていなかった。振り返ってみればその難しさは明白だ」と投稿し、「現実よりも自由度が高いことはない」と付け加えた。今回の記事では複雑性理論というテーマに立ち戻り、本質的な複雑性の科学の不思議を解き明かす他、複雑性が機械学習を用いた自動運転技術の開発にもたらす課題の一部に着目する。 ADASの新たな課題は「センサーのクリーニング」
ADASの新たな課題は「センサーのクリーニング」
自動車に、運転支援や自動運転向けに複数の種類のセンサーが搭載されるようになったことで、『予期せぬ事態』が生じている。
Copyright © ITmedia, Inc. All Rights Reserved.
記事ランキング
- 中国SiCの進化「日本は追い付けないレベル」 競わず活用を
- 日本メーカー製、でも中身は……カメラなど最新6製品を分解
- Lam ResearchがPLP特化拠点 「共に未来を」とRapidus
- キオクシア25年度 驚異の決算 Q4純利益は前年比30倍
- AI半導体で「パネルは新たなフロンティア」、Lamの装置戦略
- 「ディスプレイ1本では経営厳しい」 起死回生図るJDIの戦略
- 立体配線でSiCの体積/損失を半減 富士電機の新パッケージ技術
- AI用半導体とメモリの奪い合いに 自動車業界が供給難に直面
- AI時代を切り開くNVIDIAの戦略に脱帽 受注残1兆ドル超の衝撃
- 社会人大学院生にしか見えない「ドブ板経験」と「学問」のあいだ
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。