6万人のメイドが“合体”!? EtherCATの通信方式:江端さんのDIY奮闘記 EtherCATでホームセキュリティシステムを作る(5)(3/8 ページ)
通信方式――4タイプもある!
では、今回は、前述した(1)のEtherCATの通信タイプについてお話します。
WireSharkなどのパケットアナライザでEtherCATの通信フレームを見た方なら理解して頂けると思いますが ―― 本気で「うんざり」します。たかだか3つのEtherCATスレーブのSDOの通信だけで、1000を超えるパケットが飛び回っているからです。
EtherCATのフレームは、データリンク層(低レイヤ)のフレームなのだから、仕方がないとも言えるのですが、これを1つ1つ読んでいく作業は、かなりしんどいものでした。
これは、EtherCATマスタ(ご主人様)が、自分のネットワークの構成(お屋敷の部屋数や広さ)を理解すべく、EtherCATスレーブ(メイド)の全員の数と働いている場所と容姿(スレーブの種類)を探ろうとしているのです。これが「SDOの(ための)通信」です。
そのため、EtherCATの通信は、IP通信などとは比較にならない程、面倒くさい仕様になっています。特に、私が初めてEtherCATの通信タイプについて調べた時は、がく然としたものです。
―― (萩尾望都先生の「11人いる!」風に言えば)4タイプ(も)ある!
以下は、EtherCAT関連の資料で出てくる、通信タイプの説明です。
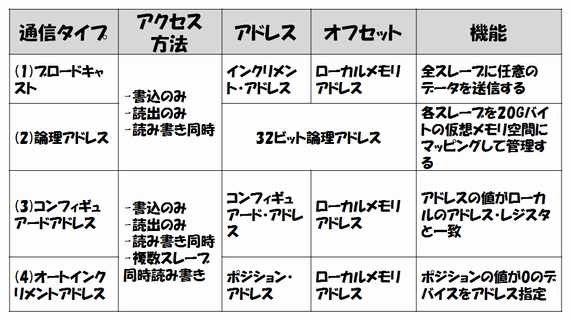
―― みんな、この表の説明で、本当に理解できるの?
私には、全く理解できませんでした。もしかしたら、『私の頭だけが、絶望的に悪いのか』と本気で落ち込みました。
そこで、今回も、例外的なレアケースや、厳密で正確な説明を、意図的に踏みにじって、ざっくり解説を試みることにします。
まず、通信タイプのカテゴリを組み直します。
基本的に「SDO」用の通信と「PDO」用の通信に区別します。
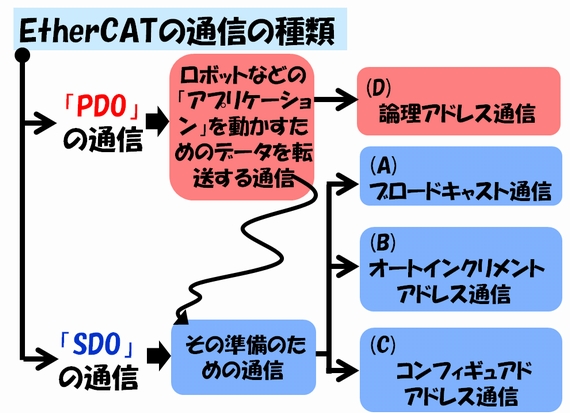
「SDO」のための通信には、3つの通信タイプがあります(そもそも、「オートインクリメントアドレス」だの「コンフィギュアドアドレス」って名称がどうも良くないと思いますが、この件は後程)。
Copyright © ITmedia, Inc. All Rights Reserved.
記事ランキング
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。