6万人のメイドが“合体”!? EtherCATの通信方式:江端さんのDIY奮闘記 EtherCATでホームセキュリティシステムを作る(5)(5/8 ページ)
ブロードキャスト通信の役割は?
このように考えれば、最初に行われる「ブロードキャスト通信」の役割は明確です。
スレーブ(メイド)の数を調べることです。
なにしろ、最初の状態では、マスタ(ご主人様)は、スレーブ(メイド)が6人いるのか、600人いるのか、60000人いるのか、全く分からないのです。
なので、ご主人様は、『番号ー!』と号令を出すと同時に、ブロードキャスト通信のフレームを流し、メイドは、そのフレームを受けると『いち!に!さん!よん!』と順番に叫びながら、叫んだ番号をそのフレームに上書きして、次のメイドに回していきます。
その時、メイドが叫んだ数が、「仮アドレス(要するにゼッケン)」になるわけです。
また、ご主人様は、戻ってきたフレームに記録されたカウントで、メイド全員の数を確認することができます。これをWorking Count(WC)と言います。
ブロードキャスト通信は、メイド全員に一斉に同じ命令を出したい時にも使われます。
例えば、全てのスレーブ(メイド)の起動モードを、一斉に変更したい時などは、いちいち特定のスレーブ(メイド)を指定する必要はなく、特定の「オフセット」だけを指定すれば、例えば、全員の起動モードをたった一回のEtherCATフレームの送信だけで変えることができます。
だからSDO通信には、3タイプもある!
以上をまとめますと、SDOのための通信に3タイプ(も)ある理由は、
(1)まずブロードキャスト通信で、スレーブに仮アドレスを与える必要があり、
(2)次に、その仮アドレスを使ったオートインクリメントアドレス通信で、スレーブに固定アドレスを与える必要があり、
(3)その固定アドレスを使って、マスタと個々のスレーブとの通信を実現する必要がある
ためなのです(かなり乱暴なざっくり説明ですが)。
―― なんと、まあ、「回りくどい」ことしているんだ?
と思われるかもしれませんが、これには理由があるのです。
例えば、EtherCATと同じく制御LANの1つであるDeviceNetでは、スレーブの外側についているスイッチで、アドレスを1つ1つ手動で設定しなければなりません。
スレーブが10台や20台程度ならともかく、これが100〜1000台のオーダーになれば、人間のやることですから、間違いなくアドレスの設定ミスが発生します*)。
*)DeviceNetの構築ツールに、この「設定ミス防止機能」を組み込んでいた、この私が言うのですから間違いありません。
比して、EtherCATでは、アドレス設定に関して人間様の出る幕はありません。
EtherCATは、ヒューマンエラーを回避して、アドレスを安全に自動的に付与する為にも、3つのSDOの通信方式を用意したのです*)。
*)制御LANの世界の、DHCP(Dynamic Host Configuration Protocol)の様なものだ、と言えば(分かる人には)分かるでしょう。
下記は、それぞれの通信フレームの1つを取り出して、Wiresharkでキャプチャしたものを図示したものです。
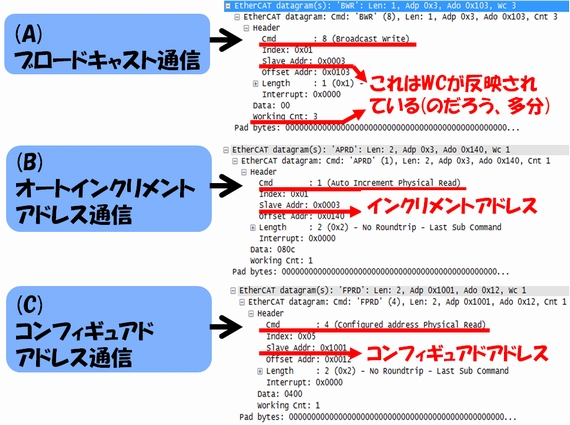
このように、アドレスのタイプが、異なっていることが分かります。
Copyright © ITmedia, Inc. All Rights Reserved.
記事ランキング
- ぼっち系エンジニア、「幸せ」について論文とデータで殴られる
- ルネサスがタイミングデバイス事業売却を完了、売却益4433億円
- カメラでも存在感放つ中国 Insta360/DJIの全天ドローンを分解
- サンケン電気、独自GaN搭載ICを公開 パウデック買収で差別化加速
- ソシオネクスト、TSMC A14活用の高性能コンピュートチップレット開発
- IBMが0.7nm世代の半導体技術発表、5年後実用化目指す
- Infineonがパワー半導体新工場 拠点の能力倍増でAI需要に対応
- 「地球で作れない高性能半導体」宇宙で製造目指す レゾナックら
- 2026年3月期通期 国内半導体装置メーカー 業績まとめ
- 「失敗する機会」を確保 村田製作所のMLCC新R&D拠点
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。