カップ1つ作るのに、ご主人様とメイドは4000回会話する:江端さんのDIY奮闘記 EtherCATでホームセキュリティシステムを作る(10)(6/8 ページ)
カナダ企業は装置に手を加えることなくコスト削減
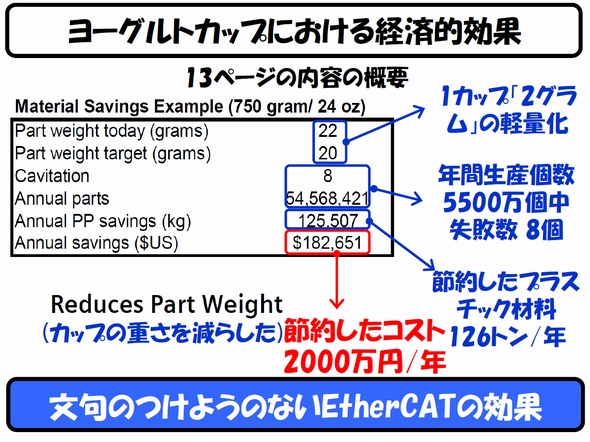
川野さん ハスキー社(Husky Injection Molding Systems/本社:カナダ)は、メカ製造に変更を加えずEtherCATの超高速制御だけで、この2000万円を捻り出したのです。
江端 一体どうやって……
詳しい内容は、こちらのPDFデータに記載がありますが、このPDFデータの27ページにあるグラフを使って簡単に説明します。
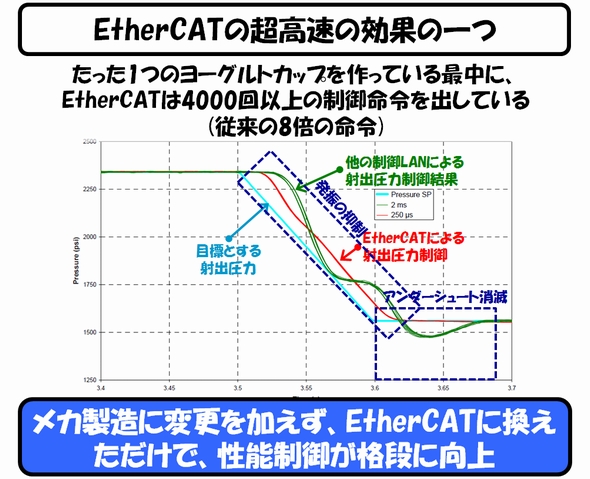
ヨーグルトカップを製造する場合、単にプラスチックを射出すれば良いわけではありません。
その射出する時間、速度、圧力を、そのタイミング毎に緻密に変化させながら、金型の中に満遍なく、同じ厚さ、密度でプラスチックを送り込み、そして、気泡(空気の泡)などを発生させてはなりません。

デコレーションケーキで、絞り袋を使って生クリームを飾り付けるときの、プロの技と同じです。
EtherCATは、わずか1個のカップを成形する間に、4000回も状況を取得し、4000回もコントロール(射出速度や圧力)を緻密に変化させ続けます。
これが従来(500回)の8倍もの細やかさで行われるのであれば、制御の精度がアップするのは当然です。
つまり、制御の世界において高速化は無条件に正義なのです。
さて、このヨーグルトカップにおけるEtherCATの超高速制御の成果は以下の通りです。
よくよく考えれば、「高速化」で悪いことなど1つもありません。
遅いものを速くすることはできませんが、その逆はいつだって簡単に実現できます。
今、EtherCATは100Mイーサネットを前提としていますが、これがギガビットイーサネットになれば、さらに1桁、制御の精度を上げることができます。現在の4000回の命令が、4万回になるということです。
従来、このような超高速のモーション制御というのは、制御LANにつながった専用制御ボード(FPGA)などで行われたものですが、恐ろしいことに、EtherCATはこのような「制御ボード」の世界までも喰い尽くす可能性があるのです。
Copyright © ITmedia, Inc. All Rights Reserved.
記事ランキング
- ソニーが新画素構造「RB2×2 OCL」採用センサー 高解像度とAF性能を両立
- AIが食い尽くすメモリ供給 企業ITを揺らす価格高騰
- TSMC撤退の逆風越え、浜松に技術者集結――27年GaN内製化へ全力のローム
- 次世代チップ積層に関する3つの基盤技術を開発
- AmazonはNVIDIAに挑戦状を突きつけるのか
- 世界半導体市場が初の単月1000億ドル超え、26年4月
- 車載は「新たな成長段階に」 SiCパワー半導体市場、5年後110億ドル規模へ
- 宙に浮く透明な会議室? 村田製作所の新拠点から見る「オフィスの現在形」
- パッケージ基板の配線微細化と歩留まりを両立させる新製法
- 反りも割れも抑制 先端パッケージ向け多層セラミックコア基板
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。