火星目指すNASAの宇宙船、探査機ローバーには各種センサーを搭載:センシング技術
2011年11月に打ち上げられたNASA(米航空宇宙局)の火星探査機には、さまざまな種類のセンサーが搭載されている。
2011年11月26日、米フロリダ州ケープ・カナベラルから火星に向けて、探査機ローバー「Curiosity」を載せた「マーズ・サイエンス・ラボラトリー(MSL:Mars Science Laboratory)」が打ち上げられた。MSLは現在、地球と火星の中間地点辺りを飛行中だ。Curiosityの任務は、現在および数百万年前の火星の気象状態の調査である。
Curiosityは火星到着後、スペイン カタルーニャ工科大学バルセロナ校(UPC:Universitat Politecnica de Catalunya)の電気通信工学部が開発したRover Environmental Monitoring Station(REMS)などの装置を用いて、“赤い星”の表面を調査する予定だ。REMSはセンサー一式を搭載しており、火星の大気や地面の地表温度、気圧、紫外線放射、湿度の他、風速や風向きなどを測定する。
集録されたデータは、科学者が、火星の気候に対する理解を深めたり、火星が微生物にとって好ましい環境であるかを判断したりする材料になるという。
REMSは、シリコンチップを用いた風センサーを搭載している。UPCの電子工学部に所属するマイクロ/ナノテクノロジー研究グループが設計し、同グループのクリーンルームで製造したものだ。同グループの研究者らによると、このチップは、米カリフォルニア州のジェット推進研究所の指導の下でテストされたという。
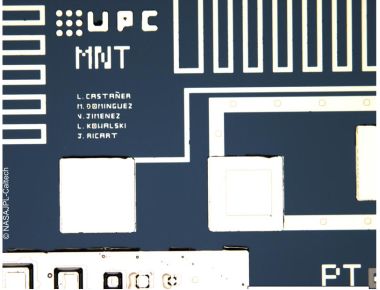 風センサーに用いているシリコンチップ。チップの表面には、開発者5名の名前がμmサイズの文字で刻まれている。開発者は、Lluis Castaner氏、Vicente Jimenez氏、Manuel Dominguez氏、Lukasz Kowalski氏、Jordi Ricart氏である。
風センサーに用いているシリコンチップ。チップの表面には、開発者5名の名前がμmサイズの文字で刻まれている。開発者は、Lluis Castaner氏、Vicente Jimenez氏、Manuel Dominguez氏、Lukasz Kowalski氏、Jordi Ricart氏である。UPCの科学者らによると、探査ローバーの作りを考慮して、REMSの各センサーはそれぞれ異なる場所に搭載されているという。最終的なREMSの構成要素は、2本のブーム(クレーンの腕のような部分)、紫外線センサーモジュール、圧力センサーモジュールとなっている。
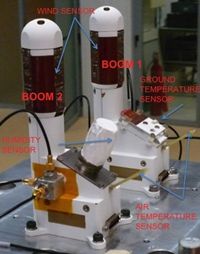 ローバーの2本のブーム。各種センサーを搭載している。
ローバーの2本のブーム。各種センサーを搭載している。2本のブームは、環境試験向けに用いられる。ブームの上側には風センサーが、下側には気温センサーがそれぞれ取り付けられる。さらに、ブームの本体部分には地表温度センサーと湿度センサーを搭載している。
ローバーのデッキの部分に搭載された紫外線センサーは、6個のフォトダイオードで構成されている。各ダイオードの波長は、335〜395nm(UVA)、280〜325nm(UVB)、220〜275nm(UVC)、210〜380nm、245〜290nm、310〜335nmである。
圧力センサーはローバー本体の内部に取り付けられている。測定範囲は0〜1150Pa(パスカル)で、精度は10Pa程度である。
Curiosityは2012年3月29日の時点で、火星への総飛行距離5億6700万kmのうち、3億1600万kmを飛行している。8月6日には火星に到達する見込みである。
【翻訳:青山麻由子、編集:EE Times Japan】
Copyright © ITmedia, Inc. All Rights Reserved.
記事ランキング
- メモリ市場が大爆発 「5年の壁」を乗り越えられるか
- パワー半導体企業ランキング、日本勢は三菱電機ら5社がトップ20入り
- 米国でInnoscience製GaN販売禁止 Infineonへの特許侵害が確定
- マイクロン、AI需要で広島工場増強へ起工式 1.5兆円投資
- メモリ価格の上昇、鈍化へ 26年3QはDRAMもNANDも10%台
- 時価総額45兆円に キオクシア復活劇を支えたNAND戦略
- メモリ起点に後工程へ本格参入 半導体の総合材料メーカー目指すADEKA
- 世界半導体市場、26年5月は1206億ドル 日本も前年比23%増
- onsemiが米国とフィリピンの2工場を売却 ファブライト推進
- 田中貴金属、水素社会実現へ「国内最大」燃料電池発電システム稼働
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。