EtherCAT通信の仕組みを知ろう〜メイドは超一流のスナイパー!?:江端さんのDIY奮闘記 EtherCATでホームセキュリティシステムを作る(2)(3/8 ページ)
「メイド」は射撃の名手!?
前回は、「ご主人様」と「メイドたち」に登場してもらって、かなり大ざっぱなEtherCATの説明を試みましたが、今回は、実際のモノで、物理レベル(信号レベル)の説明を試みます。
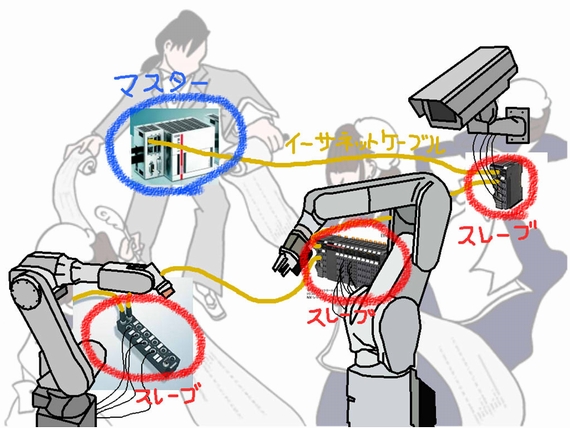
さて、このご主人様であるEtherCATマスタと、メイドであるEtherCATスレーブは、イーサネットケーブルで、「両手をつないで」ネットワークを作ります(デイジーチェーンといいます)。
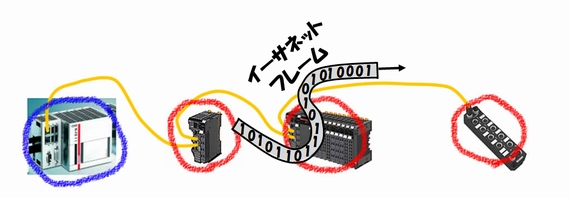
マスタは、そのネットワークに対して、イーサネットフレームという0と1が連続するビットのかたまり(最大1万2000ビット)を送信します。このイーサネットフレームには、ネットワークにつながっている、全てのスレーブへの指示が記載されています。このイーサネットフレームは、全てのスレーブを巡回して、再度マスタに戻ってきます。
「あれ? でもこの接続(デイジーチェーン)だと、ループにならないよ」とも思われるかもしれませんが、今、パソコンで使われているイーサネットケーブルは、1本のイーサネットケーブルに2本の通信路があり、「行き」と「帰り」の道が別々に存在しているので問題はありません。
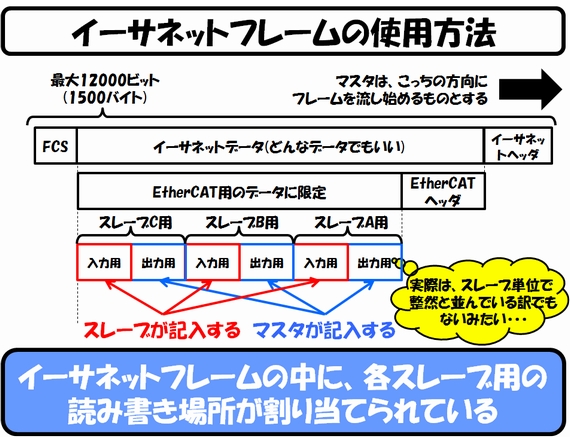
上の図は、スレーブが3つ(スレーブA、B、C)があった時の、イーサネットフレームの中身のザックリした概略図です。要は、EtherCATのマスタとスレーブは、ネットワーク上で動き続けている1つのイーサネットフレームに、必要なデータを読み書きして、お互いに交換しているだけです。
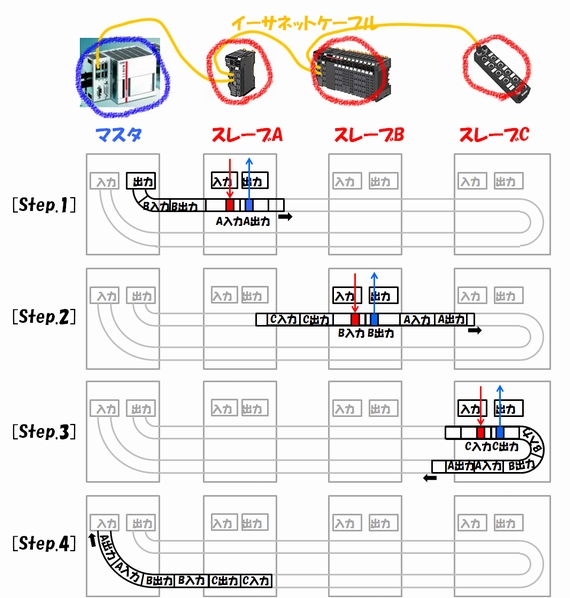
上記の図は、流れている最中のイーサネットフレームから、スレーブがデータを取り出したり、書き込んだりしている様子を示す図です。
イメージとしては、
『駅を通過している最中の新幹線に、ホームから、指定された車両の座席に向けて、正確にピンポイントの狙撃をする』
または、
『駅を通過している最中の新幹線の座席から、ホームに向けて、正確にピンポイントの狙撃をする』
という感じでしょうか。しかも、連続射撃です(数十発から数百発の連射)。
「ゴルゴ13」でも難しいだろうと思われる、高速移動中のピンポイント連続狙撃を、メイド(スレーブ)たちはやすやすとやっているわけです。
Copyright © ITmedia, Inc. All Rights Reserved.
記事ランキング
- TSMC撤退の逆風越え、浜松に技術者集結――27年GaN内製化へ全力のローム
- SiCパワー素子をPCBに埋め込んだ超薄型モジュール、東芝
- ソニーとimec、次世代3D集積向け裏面接続技術を開発
- ニコン、半導体露光装置で巻き返しなるか
- NVIDIAとSK hynixが次世代メモリ共同開発、AIファクトリー向け
- 「第3のインターポーザー」セラミック基板 ユーザーから強いニーズ
- パネル技術で液滴を操る JDI協力の液体自動制御デバイス
- ニコンの半導体後工程向け新材料 ガラス基板の課題に対応
- 「台湾の強さ」見せつけたCOMPUTEX TAIPEI 2026
- ADI日本法人新代表が語る「追い風」 AI時代にアナログ半導体が担う役割
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。