とがった物体もつかめる、タフなロボットハンド:災害現場や工場現場の作業に対応
東北大学の研究グループは、刃物やがれきなどの物体をつかむことができるタフなロボットハンドを開発した。
伸縮性ある防刃生地を採用、柔軟性と耐切創性を実現
東北大学の多田隈建二郎准教授、田所諭教授、昆陽雅司准教授、藤田政宏博士後期課程学生らによる研究グループは2018年6月、刃物やがれきなどの物体をつかむことができる、タフで柔軟なロボットハンドを開発したと発表した。がれきなどが散乱する災害現場などの作業用途で利用可能だ。
研究グループはこれまで、形状が異なるさまざまな物体をつかむことができる、ゴム膜の袋型ロボットハンドを開発してきた。ジャミング転移現象を利用するこの方法は、複雑な形状や壊れやすい物体の損傷を抑えてつかむことができる。しかし、とがった形状の物体などをつかむ場合、袋が破れてしまうこともあった。このため、災害現場などで破損したバルブの開閉やガラス破片をつかむなど、作業によっては対応することができなかった。
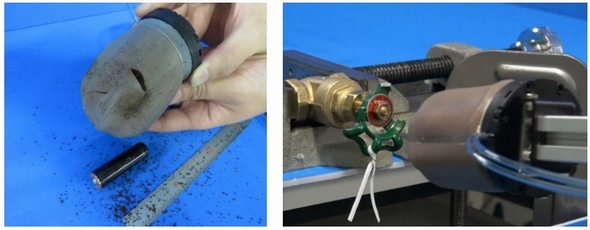 従来のロボットハンドは、つかむ物体に制限がある 出典:東北大学
従来のロボットハンドは、つかむ物体に制限がある 出典:東北大学研究グループは今回、ロボットハンドに伸縮性のある防刃生地を用いることで、柔軟性と耐切創性を実現した。具体的には、防刃生地を先端が半球形状となる袋状に加工し、その表面に滑り止め用のシリコーンゴムを塗布した。
 ロボットハンドの構造 出典:東北大学
ロボットハンドの構造 出典:東北大学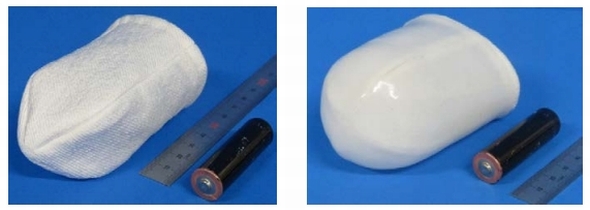 耐切創性を高めた布袋の外観(左はゴムコーティング前、右はゴムコーティング後) 出典:東北大学
耐切創性を高めた布袋の外観(左はゴムコーティング前、右はゴムコーティング後) 出典:東北大学研究グループは、開発したロボットハンドを用いて、耐切創性の実験を行った。開発した布袋は刃物による切り裂きやとがった物体による突き刺しにも、極めて高い耐切創性を有することが分かった。さらに、破損したバルブを開閉する動作の実験も行った。作業箇所には複数のとがった形状があったものの、布袋が破損することなく作業を終えたことを確認した。ニッパーを刃先からつかむ実験にも成功した。
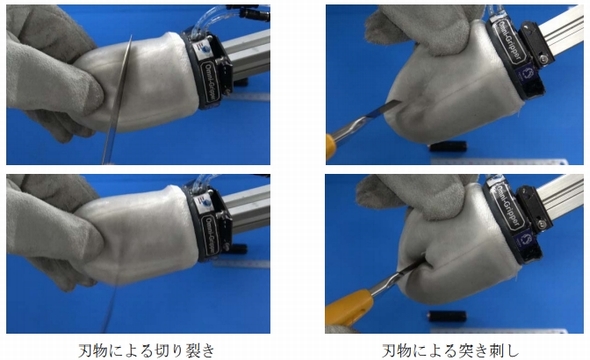 耐切創性を持つ布袋を被せたロボットハンドの例 出典:東北大学
耐切創性を持つ布袋を被せたロボットハンドの例 出典:東北大学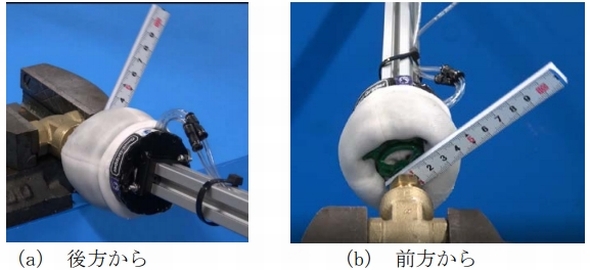 破損したバルブの開閉動作実験の様子 出典:東北大学
破損したバルブの開閉動作実験の様子 出典:東北大学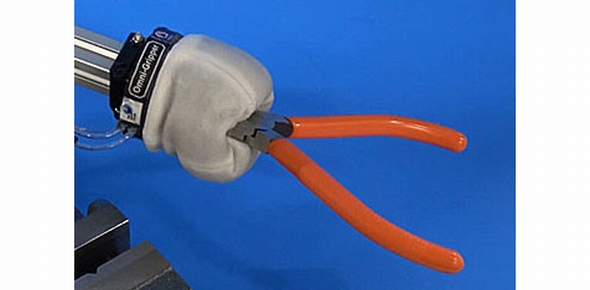 ニッパーを刃先からつかむ実験の模様 出典:東北大学
ニッパーを刃先からつかむ実験の模様 出典:東北大学さらに、災害対応用ヘビ型ロボットへの搭載に向けて、ボタン押しやハンドル把持、配電盤開けといった作業についてもその動作を検証し、十分に対応できることが分かった。
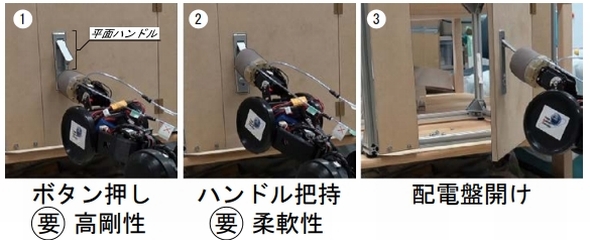 ボタン押しなどの動作検証例 出典:東北大学
ボタン押しなどの動作検証例 出典:東北大学研究グループは今後、耐久性のさらなる向上など実用化に向けた研究を行っていく。3年以内に、実環境に近い状況で実用性の確認を行い、廃品回収用の産業ロボットメーカーなどの協力を得て事業化を進める予定だ。
関連記事
 東北大学ら、次世代相変化メモリの新材料を開発
東北大学ら、次世代相変化メモリの新材料を開発
東北大学は、従来の材料とは逆の電気特性を示す相変化材料を開発したと発表した。この新材料を相変化メモリに適用すれば、データ書き換え時の消費電力小さく、高速動作を可能とする次世代不揮発性メモリを実現することができる。 磁気トンネル接合素子、直径3.8nmで動作確認
磁気トンネル接合素子、直径3.8nmで動作確認
東北大学電気通信研究所の大野英男教授らによる研究グループは、不揮発性磁気メモリ「STT-MRAM(スピン移行トルク−磁気抵抗RAM)」の大容量化を可能とする磁気トンネル接合素子の新方式を提案し、動作実証に成功した。 電子顕微鏡による3次元ナノ計測、AIで高速化に成功
電子顕微鏡による3次元ナノ計測、AIで高速化に成功
東北大学と防衛大学校は、AI(人工知能)技術を用いて、集束イオンビーム−走査型電子顕微鏡(FIB-SEM)による3次元ナノ計測を、高い解像度で高速に行える技術を開発した。 STT-MRAM用テスト装置、測定が2万倍高速に
STT-MRAM用テスト装置、測定が2万倍高速に
東北大学とキーサイト・テクノロジーは、STT-MRAM(スピン注入磁化反転型磁気メモリ)の信頼性評価を高速かつ正確に行う技術を開発した。従来システムに比べ2万倍も高速に測定することができる。 2次元超伝導体で新たな2つの量子状態を発見
2次元超伝導体で新たな2つの量子状態を発見
東京大学と東北大学の研究グループは、乱れが極めて少ない2次元超伝導体に磁場を加えると、2つの特殊な量子状態が現れることを発見。磁場による量子状態の制御にも成功した。【訂正】 横型スピン注入素子、長距離核スピン偏極を観測
横型スピン注入素子、長距離核スピン偏極を観測
東北大学金属材料研究所の塩貝純一助教らによる研究グループは、強磁性体半導体「(Ga,Mn)As(ガリウムマンガンヒ素)」を用いた横型スピン注入素子を作製し、核スピンが20μmの長距離にわたり偏極していることを明らかにした。
Copyright © ITmedia, Inc. All Rights Reserved.
記事ランキング
- マイクロン、AI需要で広島工場増強へ起工式 1.5兆円投資
- ルネサスがタイミングデバイス事業売却を完了、売却益4433億円
- キオクシア、第10世代「BiCS FLASH」を北上で生産開始 AI需要に照準
- Infineonがパワー半導体新工場 拠点の能力倍増でAI需要に対応
- ぼっち系エンジニア、「幸せ」について論文とデータで殴られる
- ルネサスが描く2035年 「AIがユーザーになる時代」の成長戦略
- ソシオネクスト、TSMC A14活用の高性能コンピュートチップレット開発
- メモリ向け300mm製造装置の投資額、26年に初の500億ドル超へ
- サンケン電気、独自GaN搭載ICを公開 パウデック買収で差別化加速
- メモリ起点に後工程へ本格参入 半導体の総合材料メーカー目指すADEKA
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。