EE Times Japan >
テスト/計測 >
人と車の位置関係を特定する技術で特許を取得:GPSなどを使わず高精度に検出
東陽テクニカは、加速度センサーからの情報に基づき、人(歩行者)と自動車の移動軌跡を算出し、両者の位置関係を高い精度で特定する技術について、特許を取得した。
» 2020年06月25日 10時30分 公開
[馬本隆綱,EE Times Japan]
他の計測システムとデータの同期も可能
東陽テクニカは2020年6月、加速度センサーからの情報に基づき、人(歩行者)と自動車の移動軌跡を算出し、両者の位置関係を高い精度で特定する技術について、特許を取得したと発表した。
開発した技術は、人に取り付けられたIMU(慣性計測装置)と、自動車に搭載されたIMUで計測された加速度データを用い、それぞれの移動量(変移)を計算し、移動軌跡を求める。これらのデータに付されたタイムスタンプを同期させ、両者の位置関係を特定することができる。
 IMUによる計測データを用い、人と自動車の位置関係を特定するイメージ 出典:東陽テクニカ
IMUによる計測データを用い、人と自動車の位置関係を特定するイメージ 出典:東陽テクニカ両者の位置関係は、誤差精度が約5cmで、毎秒2000回の頻度で検出することができるという。GPSなどの測位システムを用いないため、電波を遮るような高い建物や樹木などがある環境で利用しても、誤差の少ない位置計測が可能である。
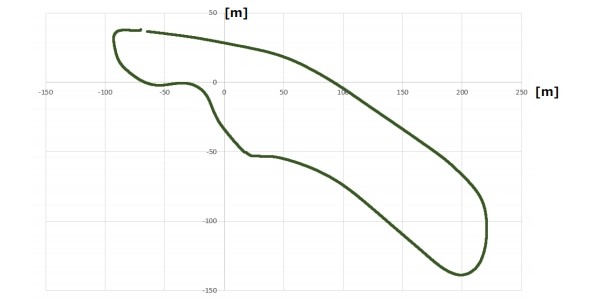 高低差が約24mあるコースを周回した自動車の移動軌跡をIMUの計測のみで描いた例 出典:東陽テクニカ
高低差が約24mあるコースを周回した自動車の移動軌跡をIMUの計測のみで描いた例 出典:東陽テクニカ開発した技術は、IMU以外の計測システムで得られるデータと同期することもできるという。一例だが、運転者の視線計測システムと同期すれば、運転者が歩行者を確認したタイミングや、その時の歩行者と自動車との位置関係を特定できる。また、ペダル操作や操舵(そうだ)といった車両の挙動に関するデータと同期することも可能だという。
東陽テクニカは、自動運転やADAS(先進運転支援システム)向けに、開発した技術と最新の計測機器とを組み合わせた「自動車計測システム」などの製品化を計画している。
関連記事
 東陽テクニカ、ISO/IEC 17025:2017認定拡張
東陽テクニカ、ISO/IEC 17025:2017認定拡張
東陽テクニカの「EMC/RF計測器校正サービス」は、米国A2LAより「ISO/IEC 17025:2017」認定範囲の拡張を認められた。この認定を受けEMIテストレシーバーについて、「CISPR16-1-1:2019年版」対応の校正サービスを始めた。 CASE時代のクルマ産業、ボトルネックになり得る半導体は何か
CASE時代のクルマ産業、ボトルネックになり得る半導体は何か
CASE(Connected、Autonomous、Shared & Services、Electric)の波が押し寄せている自動車産業。それに伴い、1台当たりのクルマに搭載される半導体の量も増加の一途をたどっている。では、そんなCASE時代の自動車産業において、“ボトルネック”となり得る半導体とは何か。 車載用半導体世界市場、2030年に586億米ドルへ
車載用半導体世界市場、2030年に586億米ドルへ
矢野経済研究所によると、車載用半導体の世界市場は2019年見込みの314億1000万米ドルに対し、2030年は586億1000万米ドル規模に達する見通しである。 自動運転を支えるMEMSセンサーとその応用
自動運転を支えるMEMSセンサーとその応用
今回は、自動運転を支えるMEMSセンサーと、その応用について解説する。 超音波センサーが自動運転やロボット、オフィス機器などの高度化を支援
超音波センサーが自動運転やロボット、オフィス機器などの高度化を支援
今回は超音波センサーを取り上げる。超音波センサーの原理と種類を説明する。 自動運転の時速が今より15km上がる? LiDAR向けIC
自動運転の時速が今より15km上がる? LiDAR向けIC
Maxim Integrated Products(以下、Maxim)は「embedded world 2020」(2020年2月25〜27日、ドイツ・ニュルンベルク)で、LiDAR向けICとして、高速コンパレーター「MAX40026」とトランスインピーダンスアンプ(TIA)「MAX40660/MAX40661」を発表した。
Copyright © ITmedia, Inc. All Rights Reserved.
Special ContentsPR
特別協賛PR
スポンサーからのお知らせPR
Special ContentsPR
Pickup ContentsPR
記事ランキング
Special SitePR
あなたにおすすめの記事PR
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。