自動運転技術を用いた「AI教習システム」を製品化:教習指導員の運転行動をルール化
東京大学は、自動車教習所の教習指導員による運転行動をルール化した運転モデルを開発。この運転モデルと自動運転技術を用いた「AI教習システム」を開発した。自動車教習所における指導員不足を支援する。
機械学習モデルを用いて運転者の顔向きも推定
東京大学大学院情報理工学系研究科の加藤真平教授らによる研究グループは2021年5月、自動車教習所の教習指導員による運転行動をルール化した運転モデルを開発した。この運転モデルと自動運転技術を用いて、危険を回避する手法も確立し「AI教習システム」として製品化した。
研究グループは、科学技術振興機構(JST)CRESTにおいて、「完全自動運転における危険と異常の予測」について研究してきた。今回の研究では、模範的な運転モデルの対象として自動車教習所の教習指導員に着目した。運行設計領域(ODD)を自動車教習の範囲に限定し、評価指標も教習指導員による評価項目のみにした。これにより、特定のユースケースとシナリオに基づいた運転モデルを開発することに成功したという。
また、取得した数値データから走行位置や加速度、車間距離、確認行動など十数項目の評価指標を抽出できる自動運転ソフトウェア「Autoware」を導入した。LiDARセンサーによる測定データとPCD高精度地図を照合することで、位置の推定や障害物をcm単位の精度で検知できる。
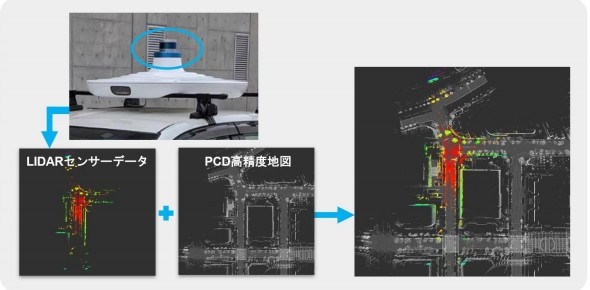 LiDARセンサーデータとPCD高精度地図を照合し、高い精度で自己位置を推定 出典:東京大学
LiDARセンサーデータとPCD高精度地図を照合し、高い精度で自己位置を推定 出典:東京大学また、車内に設置したカメラで運転手の画像を取得し、機械学習モデルを活用して顔の向きを推定する。右折や左折時の目線による安全確認など、一連の動作が適切であったかどうかを運転モデルで定量的に評価するという。
 機械学習モデルを用いて運転者の顔向きを推定 出典:東京大学
機械学習モデルを用いて運転者の顔向きを推定 出典:東京大学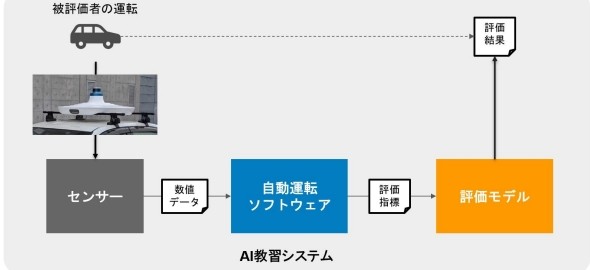 運転技能評価の仕組み 出典:東京大学
運転技能評価の仕組み 出典:東京大学開発した評価方法を自動車教習所の教習業務に用いるため、ティアフォーとミナミホールディングスが「AI教習システム」として製品化した。実用化に当たっては、走行経路を複数区間に分割し、区間ごとに評価指標とそのしきい値を設定した。その上でしきい値の範囲外の運転行動を異常と判定し、運転者にフィードバックするシステムにした。また、システム側で危険な運転行動と判断した場合は、自動でブレーキ制御を行い危険を回避する機能を備えているという。
関連記事
 磁石の向きを表面音波で制御、東北大が成功
磁石の向きを表面音波で制御、東北大が成功
東北大学らの研究グループは、表面音波(表面弾性波)が持つ角運動量を電子のスピンに移すことで、磁石の向きを制御することに成功した。 複数AIアクセラレーター搭載の評価チップを試作
複数AIアクセラレーター搭載の評価チップを試作
新エネルギー・産業技術総合開発機構(NEDO)と産業技術総合研究所(産総研)および、東京大学は共同で、仕様が異なる6種類のAIアクセラレーターを搭載した評価チップ「AI-One」を設計、試作を始めた。これを活用すると、短い期間で安価にAIチップの設計と評価が可能になる。 トポロジカル物質のFETで量子ホール効果を観測
トポロジカル物質のFETで量子ホール効果を観測
東京工業大学らの研究グループは、作製したトポロジカル半金属の電界効果トランジスタ(FET)において、空間的に離れた表面の電子状態がワイル粒子によって結合し、量子化された3次元軌道運動として量子ホール効果を示すことを実証した。 東京大、高い伝導特性を有する導電性高分子を開発
東京大、高い伝導特性を有する導電性高分子を開発
東京大学らの研究グループは、従来に比べ高い結晶性と伝導特性を有する導電性高分子を開発した。これまでより酸化力が強いラジカル塩ドーパントを独自開発し、これを高分子半導体に作用させることで実現した。 太陽光駆動の皮膚貼り付け型光脈波センサーを開発
太陽光駆動の皮膚貼り付け型光脈波センサーを開発
東京大学大学院工学系研究科の横田知之准教授らによる研究グループは、太陽光で駆動する皮膚貼り付け型の光脈波センサーを開発した。 反強磁性金属のスピン反転、10ピコ秒以下を実証
反強磁性金属のスピン反転、10ピコ秒以下を実証
東京大学らの研究グループは、トポロジカル反強磁性金属においてスピン反転の時間が10ピコ秒以下と極めて速いことを実証した。読み書き速度は、現行のMRAMに比べ10〜100倍も早くなるという。
Copyright © ITmedia, Inc. All Rights Reserved.
記事ランキング
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。