SteraVision、可動部のない自動運転用LiDARを開発:肉眼で確認できない物体も検出
SteraVisionは、可動部がない自動運転用の「ソリッドステートLiDAR」を開発した。LiDARによる物体検出と3Dカメラ画像を融合させ、自動運転車向け認識技術(パーセプションAI)と連動させることにより、人間の目のような機能を持った視覚システムを実現できるという。
自動運転車向け認識技術との連動で、高信頼の視覚システムを実現
SteraVisionは2022年2月、可動部がない自動運転用の「ソリッドステートLiDAR」を開発したと発表した。開発したLiDARによる物体検出と3Dカメラ画像を融合させ、自動運転車向け認識技術(パーセプションAI)と連動させることにより、人間の目のような機能を持った視覚システムを実現できるという。
SteraVisionは、NEDO(新エネルギー・産業技術総合開発機構)が進める「戦略的省エネルギー技術革新プログラム」の中で、燃費効率が高い自動走行システムの実現に向けて、2019年12月より「長距離・広視野角・高解像度・車載用LiDARの開発」に取り組んできた。
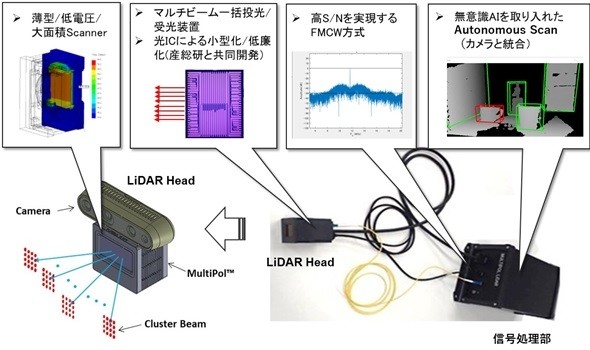 開発したソリッドステートLiDAR 出所:NEDO
開発したソリッドステートLiDAR 出所:NEDO開発したソリッドステートLiDARは、液晶を用いた方式で、光の偏光方向を高速で上下(左右)にスイッチし、光ビームをスキャンさせる構造である。スキャナー「MultiPol」の可動部をなくすことで、モーターなどを用いた従来方式で課題となっていた、金属疲労に伴う信頼性の低下や、外部振動による不安定さを防ぐことができるという。
また、光方向性結合器やY分岐器など、多くの光素子を1チップに集積した。これにより、同時に多くの光ビームをスキャンすることができ、LiDARの小型化・低価格化を可能にした。

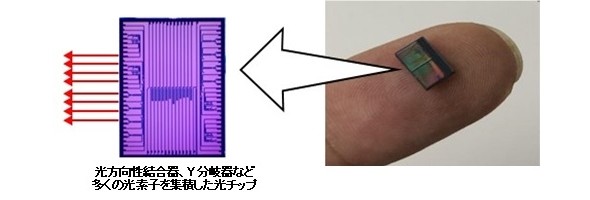 開発したフォトニックICの外観 出所:NEDO
開発したフォトニックICの外観 出所:NEDO開発したLiDARは、距離の計測方法として主流となっているToF方式ではなく、FMCW(周波数連続変調)方式を採用した。MultiPolとFMCW技術を組み合わせることで、障害物までの距離に加え、肉眼で確認できない遠方や濃霧などの環境においても、物体の確認と速度の検出が可能となった。
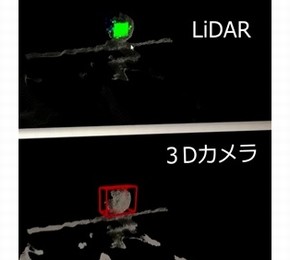 カメラ画像のパーセプションAIと、LiDARを融合した重みづけスキャンの例 出所:NEDO
カメラ画像のパーセプションAIと、LiDARを融合した重みづけスキャンの例 出所:NEDOさらに、LiDARによる物体検出と、3Dカメラ画像の自動運転車向け認識技術を融合させたことで、遠方にある重要な物体を選択的にLiDARでスキャンし、その物体を検出、追跡することが可能となった。つまり、「見たいところだけ詳しく見る」という、人間の目のような機能を持つ視覚システムを実現することができる。
SteraVisionは今後、レベル4/5の自動運転やFA、ロボティクスシステム、セキュリティといった用途に向けて、ソリッドステートLiDARの性能をチューニングし、2022年7月頃からサンプル出荷を始める予定。
関連記事
 MEMS技術を用い電子部品の薄型・小型化を実現
MEMS技術を用い電子部品の薄型・小型化を実現
新エネルギー・産業技術総合開発機構(NEDO)とアルファー精工、旭電化研究所および、シナプスは、MEMS技術を用い、薄型かつ小型で優れた伝送特性を備えた電子部品の開発に成功した。素材として金属と樹脂を用いるため、第6世代移動通信(6G)システム向けのコネクターやソケットなどに適用することができる。 アンペア級で耐圧1200Vの酸化ガリウムSBDを開発
アンペア級で耐圧1200Vの酸化ガリウムSBDを開発
ノベルクリスタルテクノロジーは、アンペア級の大電流に対応する耐圧1200Vの「酸化ガリウムショットキーバリアダイオード」を開発した。2023年の製品化を目指す。次世代電気自動車や空飛ぶクルマなどの用途に向ける。 4インチGaN結晶、大型実証設備で均一に成長
4インチGaN結晶、大型実証設備で均一に成長
日本製鋼所と三菱ケミカルは、大型のGaN(窒化ガリウム)基板製造実証設備を用いて製造した4インチのGaN結晶が、計画通りに成長していることを確認した。2022年度初めより、GaN基板の供給を始める予定である。 積水化学、ペロブスカイト太陽電池を2025年事業化へ
積水化学、ペロブスカイト太陽電池を2025年事業化へ
積水化学工業は2021年11月11日、同社の製品/技術を通じた社会課題解決についてのオンライン説明会を開催した。説明会では「脱炭素社会実現の鍵になる」技術の1つとして同社が開発する「ペロブスカイト太陽電池」を紹介。同社社長の加藤敬太氏「非常に期待値の高い電池だ。実証実験を経て、2025年に事業化したい」と語った。 スマホでAI処理を行うプロセッサアーキテクチャ
スマホでAI処理を行うプロセッサアーキテクチャ
東京工業大学は、高度なAI処理をスマートフォンなどで実行できる「プロセッサアーキテクチャ」を開発した。試作したチップの実効効率は最大26.5TOPS/Wで、世界トップレベルだという。 光ICと光ファイバー間の3次元光配線技術を開発
光ICと光ファイバー間の3次元光配線技術を開発
新エネルギー・産業技術総合開発機構と技術研究組合光電子融合基盤技術研究所は、光ICと光ファイバー間の3次元光配線技術を開発した。開発した試作品を用い、85℃の高温環境下で毎秒112Gビットの高速光伝送に成功した。
Copyright © ITmedia, Inc. All Rights Reserved.
記事ランキング
- TSMC撤退の逆風越え、浜松に技術者集結――27年GaN内製化へ全力のローム
- ソニーとimec、次世代3D集積向け裏面接続技術を開発
- AIが食い尽くすメモリ供給 企業ITを揺らす価格高騰
- AMDがメモリ最適化技術の新興を買収 「メモリの壁」を打破できるか
- 次世代チップ積層に関する3つの基盤技術を開発
- ソニー初のLOFIC搭載スマホ用画像センサー 飽和電荷量10倍に
- 世界半導体市場が初の単月1000億ドル超え、26年4月
- 宙に浮く透明な会議室? 村田製作所の新拠点から見る「オフィスの現在形」
- ADI日本法人新代表が語る「追い風」 AI時代にアナログ半導体が担う役割
- 最高速のガラス微細貫通穴加工技術を開発、理研
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。