深層強化学習法により、超音波モーターを最適制御:遠隔手術装置などへの応用に期待
東京大学は、深層強化学習法を用いて、超音波モーターを最適駆動する制御システムを開発した。超音波モーターを手術ロボティックスや触覚提示システムなどへ搭載することが可能になるという。
ActorニューラルネットワークとCriticニューラルネットワークを構築
東京大学大学院新領域創成科学研究科の森田剛教授(現在は大学院工学系研究科精密工学専攻)とアブドラ ムスタファ氏、笹村樹生氏は2022年5月、深層強化学習法を用いて、超音波モーターを最適駆動する制御システムを開発したと発表した。超音波モーターを手術ロボティックスや触覚提示システムなどへ搭載することが可能になるという。
超音波モーターは、「重量当たりのトルクが大きい」「小型化が可能」「高速応答性に優れている」といった特長を持つ。半面、温度上昇によって各種パラメーターが変化することや、入力電圧信号に対する回転出力の非線形性が強いことなどから、最適に制御するのが難しかったという。
そこで今回、深層強化学習法を適用した超音波モーターの制御手法を新たに開発し、従来の課題を解決した。具体的には、強化学習法の中でも連続値制御のための有力手法である「Soft Actor-Critic(SAC)」を用い、超音波モーターへの入出力関係を学習する「Actorニューラルネットワーク」と、このシステムを評価する「Criticニューラルネットワーク」を構築した。
Actorニューラルネットワークの入力パラメーターには、駆動周波数や超音波モーターの温度、エンコーダーで計測した回転速度、目標回転速度として駆動周波数の増減量を出力するシステムとした。
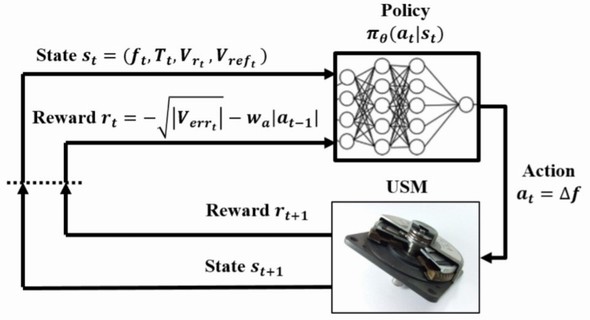 超音波モーター制御における深層強化学習のシステム構成 出所:東京大学
超音波モーター制御における深層強化学習のシステム構成 出所:東京大学実験では、目標回転速度を変化させながら超音波モーターを制御し、実際の回転速度との関係からニューラルネットワークの重み付けパラメーターを学習することにより、極めて柔軟な制御則を得ることができたという。Criticニューラルネットワークの出力による評価値も、収束することを確認した。学習で得られたパラメーターを用いて超音波モーターを駆動すれば、温度変化に対応しながら、最適条件で高速駆動させることが可能になる。
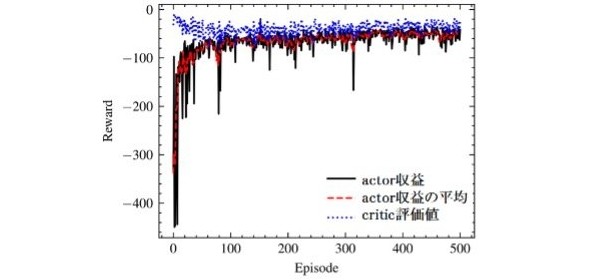
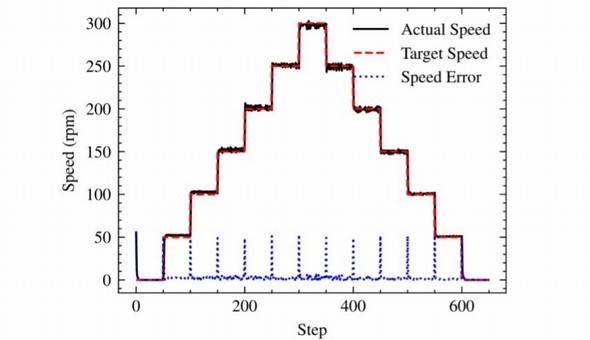 上図は深層強化学習法の学習履歴、下図は深層強化学習法による制御システムを用いた回転速度制御の結果 出所:東京大学
上図は深層強化学習法の学習履歴、下図は深層強化学習法による制御システムを用いた回転速度制御の結果 出所:東京大学深層強化学習法は今回、回転速度の制御に適用したが、トルク制御や位置制御、コンプライアンス制御、効率最適化などに対しても有用な手法だという。
関連記事
 東京大ら、トポロジカル導波路の広帯域化を可能に
東京大ら、トポロジカル導波路の広帯域化を可能に
東京大学と慶應義塾大学、電磁材料研究所の研究グループは、ENZ特性を持つ磁気光学材料を用いることで、帯域が広いトポロジカル導波路を実現できることを明らかにした。光回路のさらなる高密度高集積化が可能となる。 東京大ら、テラヘルツ領域の光起電力効果を観測
東京大ら、テラヘルツ領域の光起電力効果を観測
東京大学と理化学研究所らの研究グループは、強誘電体「BaTiO3(チタン酸バリウム)」を用い、テラヘルツ光照射による光電流の観測に成功した。可視光の約1000分の1の光エネルギーで発電が可能になるという。 新手法で燃料電池触媒のORR活性を2倍以上に向上
新手法で燃料電池触媒のORR活性を2倍以上に向上
量子科学技術研究開発機構(量研)と東京大学、日本原子力研究開発機構らの研究グループは、燃料電池自動車(FCV)の動力源となる固体高分子形燃料電池(PEFC)の触媒性能を、2倍以上も向上させる新たな手法を開発した。 結晶対称性を反映した新原理の超伝導整流現象を発見
結晶対称性を反映した新原理の超伝導整流現象を発見
東京大学の研究グループは、埼玉大学や東京工業大学のグループと共同で、空間反転対称性の破れた超伝導体「PbTaSe2」において、外部磁場がなくても巨大な整流特性を示すことを発見し、その微視的な機構を明らかにした。 複数AIアクセラレータ搭載チップ、動作を確認
複数AIアクセラレータ搭載チップ、動作を確認
新エネルギー・産業技術総合開発機構(NEDO)らは、仕様が異なる6種類のAIアクセラレータを搭載した実証チップ「AI-One」を試作し、設計通りの周波数で動作することを確認した。AIアクセラレータ向け評価プラットフォームを活用することで、従来に比べAIチップの開発期間を45%以下に短縮できるという。 アクリル板と水でガラスやシリコン表面を平たん化
アクリル板と水でガラスやシリコン表面を平たん化
東京大学は、アクリル板と水だけを用い、ガラス表面とシリコン表面を原子レベルで平たん化できる「表面研磨技術」を開発した。微粒子や薬液を一切用いない、低コストで極めてクリーンな研磨法である。
Copyright © ITmedia, Inc. All Rights Reserved.
記事ランキング
- TSMC撤退の逆風越え、浜松に技術者集結――27年GaN内製化へ全力のローム
- AIが食い尽くすメモリ供給 企業ITを揺らす価格高騰
- ソニーとimec、次世代3D集積向け裏面接続技術を開発
- ソニーが新画素構造「RB2×2 OCL」採用センサー 高解像度とAF性能を両立
- 次世代チップ積層に関する3つの基盤技術を開発
- ソニー初のLOFIC搭載スマホ用画像センサー 飽和電荷量10倍に
- AMDがメモリ最適化技術の新興を買収 「メモリの壁」を打破できるか
- 世界半導体市場が初の単月1000億ドル超え、26年4月
- 宙に浮く透明な会議室? 村田製作所の新拠点から見る「オフィスの現在形」
- 車載は「新たな成長段階に」 SiCパワー半導体市場、5年後110億ドル規模へ
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。