実践! ご主人様とメイドがステッピングモーターを動かす:江端さんのDIY奮闘記 EtherCATでホームセキュリティシステムを作る(7)(2/7 ページ)
EtherCATの2大技巧「SyncManager」
こんにちは、江端智一です。
前回は、EtherCATを使ってステッピングモーターを回している動画、その回路図、slaveinfo.exeを使ったマスタのメモリマッピングの実体についてお話しました。
そして、EtherCATの2大技巧(と江端が勝手に呼んでいる)の1つ、FMMU(Fieldbus Memory Management Unit)の解説まで行いました。
今回は、もう1つのSyncManager(以下、SMと言います)について説明します。
SMとは、(乱暴に言えば)メッセージを記載した用紙を一時的に置いておく机のようなものです。しかも、その机には(原則として)1枚の用紙しか置けません(以下、簡単に「バッファ」と言ってしまいます)。
ただ、SM0とSM1、そしてSM2とSM3では、置かれるメッセージの内容と性質が、まるっきり違います(SM3とSM4がミカン箱の机*)のサイズなのに対して、SM0、SM1の机は、その100倍以上も大きいのです)。
*)たとえが古過ぎるかな
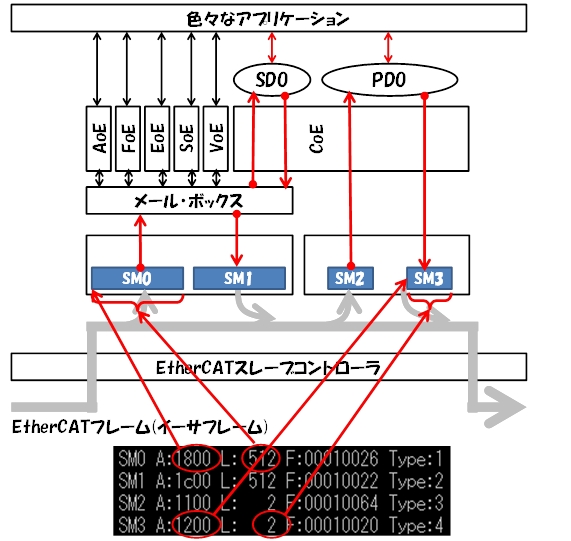
[SM0]は、メイド(スレーブ)が、仕事が比較的暇な時にチェックする、ご主人様(マスタ)からの手紙の受信用のバッファで、[SM1]は、逆にメイドからご主人様へ送付する手紙の送信用のバッファになります。非同期の通信用に使います。[SM0][SM1]を取り扱う時のメイドの稼働イメージは「のんびり/ほのぼのモード」です。
一方、[SM2]に到着するメッセージは、製造ラインを、ミリメートル、マイクロ秒単位の超絶高精度で制御するための、ご主人(マスタ)からの命令書用のバッファです。恐しく正確なタイミングで、最大毎秒8000回も届けられます。
メイド(スレーブ)は、そのメッセージを受けとるや否や、全力でその命令を実施し、その結果を、[SM3]のバッファからご主人様(マスタ)に返信します。
[SM2][SM3]は、周期プロセスデータ通信に使うもので、メイドの稼働イメージは「締め切り前/火事場モード」です。

(なお、1つのスレーブの中に「のんびり/ほのぼのモード」と「締切前/火事場モード」の2人のメイドがいるわけではなく、同一人物が2つの仕事を行っています)
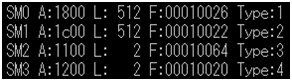
上図のケースでは、SyncManagerのサイズが、メールボックス通信用に512バイト、プロセス通信用に2バイトとなっているのが分かります(机のサイズとしては、256倍の差があります)。
Copyright © ITmedia, Inc. All Rights Reserved.
記事ランキング
- ソニーが新画素構造「RB2×2 OCL」採用センサー 高解像度とAF性能を両立
- AIが食い尽くすメモリ供給 企業ITを揺らす価格高騰
- AmazonはNVIDIAに挑戦状を突きつけるのか
- 車載は「新たな成長段階に」 SiCパワー半導体市場、5年後110億ドル規模へ
- 世界半導体市場が初の単月1000億ドル超え、26年4月
- パッケージ基板の配線微細化と歩留まりを両立させる新製法
- 反りも割れも抑制 先端パッケージ向け多層セラミックコア基板
- 宙に浮く透明な会議室? 村田製作所の新拠点から見る「オフィスの現在形」
- 次世代チップ積層に関する3つの基盤技術を開発
- 「失敗する機会」を確保 村田製作所のMLCC新R&D拠点
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。