ドローン同士が直接通信、ニアミスを自動で回避:目視外飛行でも安全に運用
情報通信研究機構(NICT)は、ドローン(小型無人航空機)同士が直接通信を行い、ニアミスを自動的に回避する実験に成功した。
飛行制御装置でドローンマッパーとフライトコンピュータを連動
情報通信研究機構(NICT)は2019年1月、ドローン(小型無人航空機)同士が直接通信を行い、ニアミスを自動的に回避する実験に成功したと発表した。
NICTはこれまで、目視外飛行環境でのドローンの利活用に向けて、920MHz帯を用いた機体間通信による位置情報共有システム「ドローンマッパー」を開発し、新エネルギー・産業技術総合開発機構(NEDO)のDRESSプロジェクトなどで実証実験を重ねてきた。ただ、これまでは操縦者の手元にある地上局を介してドローンの飛行制御を行っていた。
今回の実証実験では、ドローン同士が通信を行い、互いの位置情報や識別番号を共有することに加え、機体間通信で得られた位置情報をドローンの飛行制御に活用するための飛行制御装置を新たに試作し、これを搭載した。
飛行制御装置は、ドローンマッパーで得られる周辺のドローンの位置情報に基づき、接近中のドローンを検知する。さらに、接近するドローンが飛行する方向の情報などを分析し、ドローン自らが飛行速度や飛行方向を制御する。これによって、操作者を介さなくても相手機とのニアミスを回避して、目的地まで飛行することが可能だ。
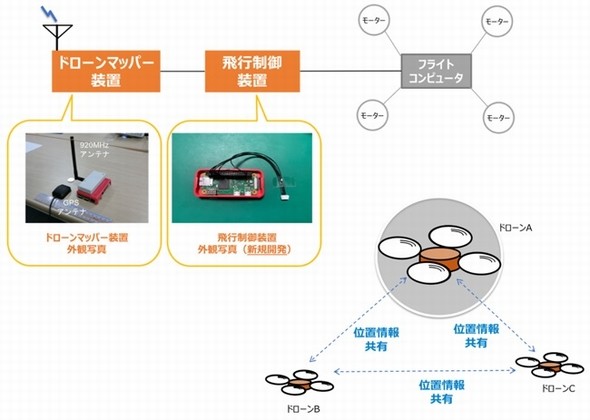 ドローンマッパーと飛行制御装置を連接したドローンの構成図出典:NICT
ドローンマッパーと飛行制御装置を連接したドローンの構成図出典:NICTNICTは2018年12月中旬、異なる操縦者が運用する複数のドローンに、ドローンマッパーと飛行制御装置を搭載し、埼玉県秩父市のグランドで実証実験を行った。この試験では、「3機のドローンによるニアミス」「編隊飛行を行う3機のドローンと対向のドローン1機」「1対1の回避飛行」など、いくつかの状況を想定して実験を行った。ドローン同士が約40mまで接近すると、自動でニアミスを回避するよう行動し、安全距離を保ちながら、目的地に到達できることを確認した。

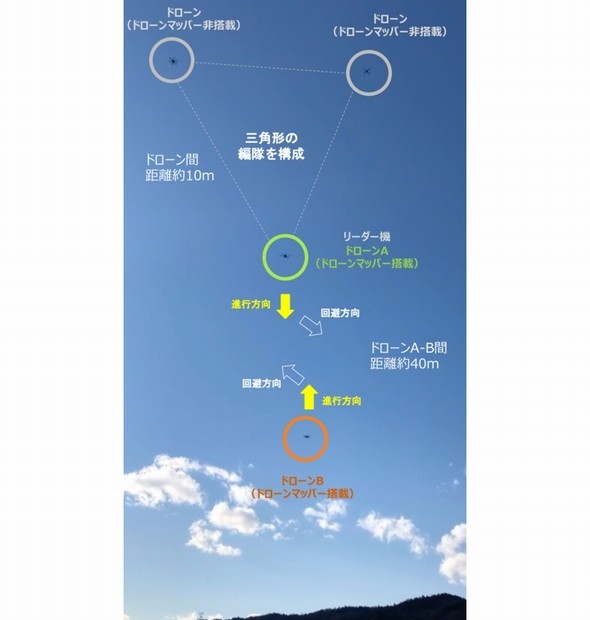
 飛行制御試験の模様。上段は3機のドローンによるニアミス回避飛行の模様。中段は編隊飛行をする3機のドローンと対向のドローン1機が互いに衝突を回避する模様。下段は1対1の回避飛行の軌跡 出典:NICT
飛行制御試験の模様。上段は3機のドローンによるニアミス回避飛行の模様。中段は編隊飛行をする3機のドローンと対向のドローン1機が互いに衝突を回避する模様。下段は1対1の回避飛行の軌跡 出典:NICT今回の実験は、飛行速度を毎秒1mに設定するなど比較的ゆっくりとした状況で行った。次のステップではもっと速い飛行速度で性能試験を行う計画だ。さらに、ドローンと有人ヘリコプターにおける接近検知や飛行制御といった試験も予定している。
関連記事
 NICTら、毎秒1.2ペタビットの伝送実験に成功
NICTら、毎秒1.2ペタビットの伝送実験に成功
情報通信研究機構(NICT)ネットワークシステム研究所とフジクラなどの研究グループは、直径0.16mmの4コア・3モード光ファイバーを用い、毎秒1.2ペタビットの伝送実験に成功した。 NICTが5G実証試験、端末約2万台の同時接続を確認
NICTが5G実証試験、端末約2万台の同時接続を確認
情報通信研究機構(NICT)ワイヤレスネットワーク総合研究センターは、5G(第5世代移動通信)の実証試験を行い、端末機器約2万台を同時に接続して通信できることを確認した。 超電導人工原子で巨大光シフトを観測、量子計算に進展
超電導人工原子で巨大光シフトを観測、量子計算に進展
情報通信研究機構(NICT)らの研究グループは、超電導人工原子と光子の相互作用によって生じる、極めて大きなエネルギー変化(光シフト)を、実験によって初めて観測した。 カーブミラーと5Gで道路状況を把握、次世代交通インフラ
カーブミラーと5Gで道路状況を把握、次世代交通インフラ
情報通信研究機構(NICT)は2018年5月16日、5G(第5世代移動通信)を活用する交通インフラの構築に向け、センサーを内蔵した電子カーブミラーを用いて道路環境を把握する技術を発表した。 5台の端末を同時接続、周波数利用効率がLTEの2.5倍に
5台の端末を同時接続、周波数利用効率がLTEの2.5倍に
情報通信研究機構(NICT)ワイヤレスネットワーク総合研究センターは2018年8月20日、周波数利用効率を大幅に向上する新たな無線アクセス技術「STABLE」を開発。横須賀リサーチパーク(YRP)にて屋外伝送実験を行った結果、周波数利用効率を従来の2.5倍に向上できることを確認したと発表した。 製造現場向け無線通信規格ドラフト版を策定
製造現場向け無線通信規格ドラフト版を策定
フレキシブルファクトリーパートナーアライアンス(FFPA)は、さまざまな無線通信規格が混在する製造現場において、安定した無線通信を実現するための「無線通信規格ドラフト版」を取りまとめた。
Copyright © ITmedia, Inc. All Rights Reserved.
記事ランキング
- ソニーが新画素構造「RB2×2 OCL」採用センサー 高解像度とAF性能を両立
- TSMC撤退の逆風越え、浜松に技術者集結――27年GaN内製化へ全力のローム
- AIが食い尽くすメモリ供給 企業ITを揺らす価格高騰
- 次世代チップ積層に関する3つの基盤技術を開発
- AmazonはNVIDIAに挑戦状を突きつけるのか
- 世界半導体市場が初の単月1000億ドル超え、26年4月
- 車載は「新たな成長段階に」 SiCパワー半導体市場、5年後110億ドル規模へ
- 宙に浮く透明な会議室? 村田製作所の新拠点から見る「オフィスの現在形」
- パッケージ基板の配線微細化と歩留まりを両立させる新製法
- 反りも割れも抑制 先端パッケージ向け多層セラミックコア基板
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。