制御の世界の“黒船”、TwinCATでメイドを動かす:江端さんのDIY奮闘記 EtherCATでホームセキュリティシステムを作る(9)(9/13 ページ)
【Step 9】スレーブ(メイド)たちの接続
では、ここから、EtherCATの十八番(おはこ)である、自動構築のマジックをご覧いただきましょう。
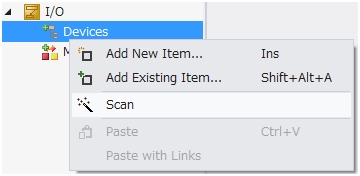
TwinCAT3の左側にあるツリーの「I/O→Devices」右クリックし、「Scan」を選択してください。
次のダイアログで「OK」を押すと、
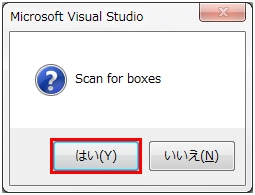

てな画面がでてきますので、「はい」「はい」と押し進めると、現在接続されているスレーブ(メイドたち)が、TwinCAT3の左側のツリーに、全員、どどどどっとラインアップされます。
―― 壮観
うん、うん、やっぱり、EtherCATの自動構築はいいなぁ。
ここで、よーーーーやく、TwinCAT3によるEtherCATの構築が一通り完了です。
でもね、TwinCAT3のインストールや構築、全然ラクじゃないでしょう? まあ、制御LANの世界でラクしようというのが、どだい無理な話なのかもしれませんが。

では、せっかく、スレーブ(メイド)たちをコントロールできる状態になったのですから、ちょっと、メイドたちと遊んでみましょう。
まずは手動で、LEDライトを付けたり、センサー値を読み取ったりしてみます。
まず、メニューバーから「TWINCAT→Toggle Free Run State」を選択してFree Runモードにしてください("Free Run"とは何ぞや、てなことは考えなくても良いです)。
そして前回のコラムで紹介したメイド"Rio"のLEDを点滅させます。
TwinCAT3の左側に表示されているツリーから"Rio"のデバイスを選択して、そのデジタル出力ポートの信号を手動でオンにしてみます。
その映像がこちらです。

では、今度は"Yuko"のセンサー値の取得をリアルタイムで見てみましょう。
4つのセンサー値がリアルタイムで動いているのが見えます。その映像はこちらです。
LED点滅用のスイッチも、センサー値を表示する画面も全部作って待っていてくれる。これが、ESI(Ethernet Slave Information)とEtherCATツール(TwinCAT3)の連携によるマジックです。
もし、SOEMで同じようなことをやろうとすれば、これ、全部私が1人で画面を作らなければなりませんが、はっきりいってそんなことは不可能です。
Copyright © ITmedia, Inc. All Rights Reserved.
記事ランキング
- ソニーが新画素構造「RB2×2 OCL」採用センサー 高解像度とAF性能を両立
- AIが食い尽くすメモリ供給 企業ITを揺らす価格高騰
- TSMC撤退の逆風越え、浜松に技術者集結――27年GaN内製化へ全力のローム
- 次世代チップ積層に関する3つの基盤技術を開発
- AmazonはNVIDIAに挑戦状を突きつけるのか
- 世界半導体市場が初の単月1000億ドル超え、26年4月
- 車載は「新たな成長段階に」 SiCパワー半導体市場、5年後110億ドル規模へ
- 宙に浮く透明な会議室? 村田製作所の新拠点から見る「オフィスの現在形」
- パッケージ基板の配線微細化と歩留まりを両立させる新製法
- 反りも割れも抑制 先端パッケージ向け多層セラミックコア基板
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。