7つの海で大活躍、水中ロボット最新事情:フォトギャラリー(4/4 ページ)
動きはカメそっくり、難破船調査用の水中ロボット
エストニアのTallinn University of Technologyが開発したカメ型ロボット「U-CAT」は、外見こそ本物のカメとは似ても似つかないが、その動作は非常によく似ている。ほとんどの水中ロボットがプロペラを使って前進するのに対し、U-CATは4つのひれをそれぞれ個別に動かして前に進むので、操縦性に優れているという。前後と上下に進むだけでなく、360度の回転も可能だ。ビデオカメラも搭載していて、U-CATの“本業”である難破船の調査など、狭い空間での作業において威力を発揮する。
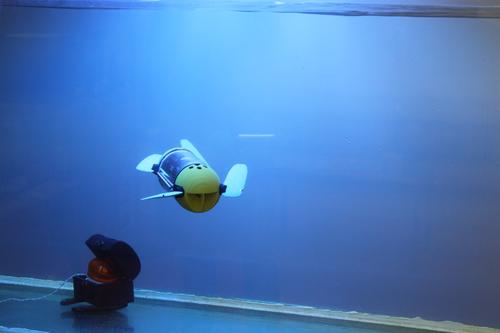 出典 Tallinn University of Technology
出典 Tallinn University of Technology水中ロボットもオープンソース化へ
オープンソース化の動きは、水中ロボットの分野にも及んでいる。ライブビデオカメラを搭載した遠隔操作探査機もその一例だ。OpenROVが運営するコミュニティは、DIY(Do It Yourself)愛好者など一般の人々が設計プラットフォームを研究できるよう、自作用の設計キットを用意したり、最初の段階から全て自分で作れるようにファイルやビルドノートを含めた部品リストを提供したりしている。
ハードウェアもソフトウェア(コードや設計ファイル)は、いずれもオープンソースだ。現在の最新バージョンは2.5である。設計キットに同梱されているのは、小型のマザーボード「Beaglebone Black」と「Arduino MEGA」、長さ100mのケーブル、LED光アレイ、広角レンズを搭載したHDビデオ、ブラシレスDCモーター、Graupnerの高性能船用プロペラ、寸法/距離測定用レーザーエミッタ、電圧レギュレータ、HiTecのマイクロサーボなどである。
 出典 OpenROV
出典 OpenROV水陸両用の万能ロボ
QinetiQが開発した「C-TALON」(水陸両用なので、ビーチロボットと呼ぶべきだろうか)は、探索救助や危険廃棄物処理を行う陸上ロボット「TALON」のプラットフォームをベースとして開発された。C-TALONは、水中でも作業できるので、軍用機器として港湾や河川、波打ち際といったエリアにおける諜報や監視、偵察などの任務をサポートすることができる。
河川の航法研究にも利用されるので、Draper Laboratoryが開発したナビゲーション用のソフトウェアを搭載している。さらに、通信センサーやナビゲーションセンサー、GPSやコンパス、圧力センサー、走行距離計、高解像度のイメージングソナーなども備えている。この他、暗視カメラやハイドロフォン、光ファイバーリンクなども搭載するという。
 出典 QinetiQ
出典 QinetiQ- 注目の展示を写真で振り返る! 「第36回 ものづくり ワールド[東京]」
- 写真で振り返る「東京オートサロン2024」
- 写真で振り返る「ジャパンモビリティショー2023」
- MONOist編集部厳選! 写真で振り返る「日本ものづくりワールド 2023」
- 写真で振り返る「人とくるまのテクノロジー展 2023 YOKOHAMA」
- 新型「プリウス」採用部品を一挙展示、ゆるキャラが魔法少女とコラボ
- 変形や前開きドアなど多士済々の超小型EVたち――「SMART MOBILITY CITY 2015」
- 自動車業界の出展が減ったCEATEC、それでも自動車関連展示は注目の的
- 低燃費? そんなことよりかっこいいクルマだッ!――東京オートサロン2015
- 日産がいなくなったCEATEC、コックピット展示は大幅増加
【翻訳:青山麻由子、田中留美、編集:EE Times Japan】
関連記事
 自動運転車や農林ロボットにみる「世界のロボット事情と日本の現状」
自動運転車や農林ロボットにみる「世界のロボット事情と日本の現状」
米国電気電子学会(IEEE)は「世界のロボット事情と日本の現状」と題するプレスセミナーを開催した。IEEEフェローで東北大学大学院教授の小菅一弘氏、IEEEフェローで早稲田大学理工学術院教授の菅野重樹氏および、早稲田大学理工学術院准教授(主任研究員)の白井裕子氏らが、世界に目を向けた研究開発の重要性や、農林業向けロボット開発の現状などについて説明した。 ロボットが熱い! 若田宇宙飛行士と会話する、時速25kmで走る……
ロボットが熱い! 若田宇宙飛行士と会話する、時速25kmで走る……
産業用ロボットから、商業施設などでサービスをするロボットまで、さまざまなロボットが開発されている。ここでは、今話題のロボットをいくつか紹介する。 どんな姿にも変形できる極小ロボット、タンパク質に着想を得てMITが開発【動画あり】
どんな姿にも変形できる極小ロボット、タンパク質に着想を得てMITが開発【動画あり】
米大学の研究チームが、自らを折り畳んでさまざまな形に変化する極小ロボットを開発した。タンパク質から着想を得たものだという。プログラムされた形状に自ら変化する、究極の素材を開発する足掛かりとなるかもしれない。
Copyright © ITmedia, Inc. All Rights Reserved.
記事ランキング
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。